光プローブ励振およびシアフォース検出システムの高速化
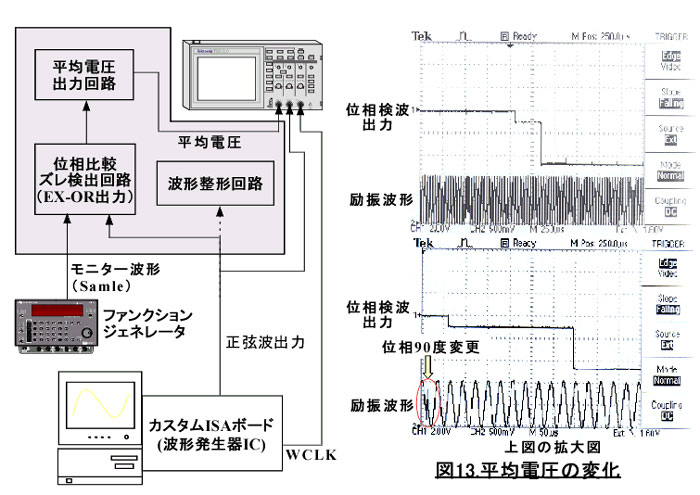
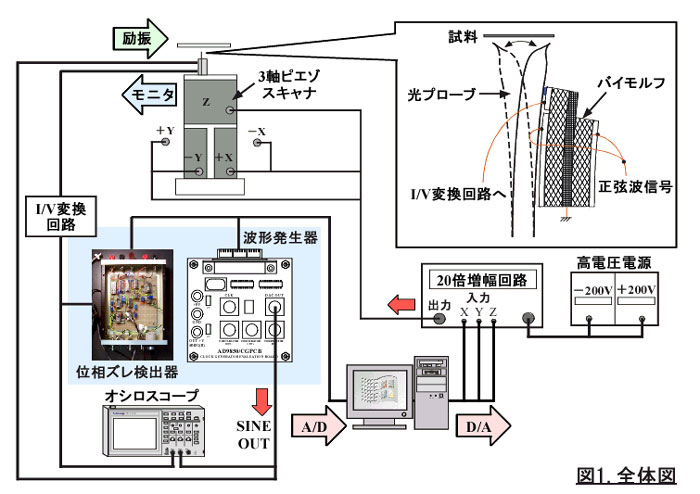
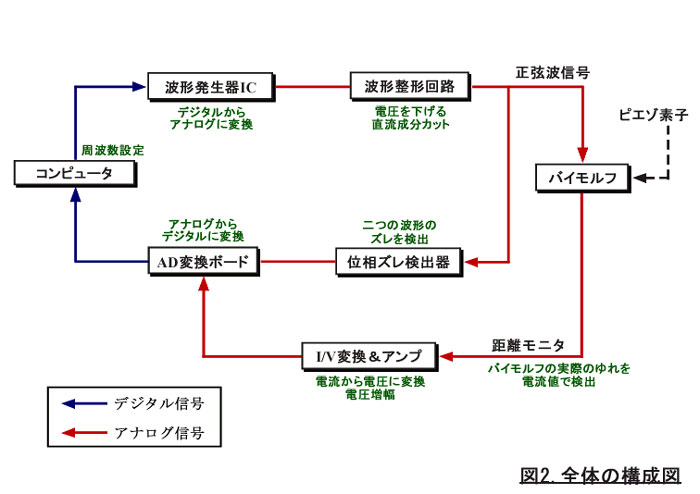
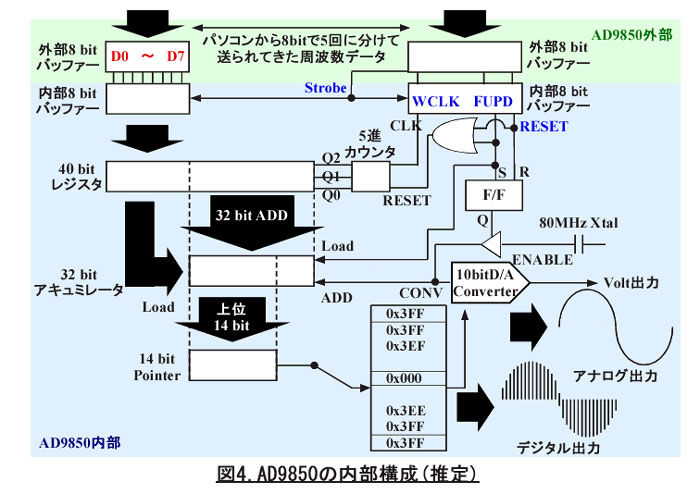
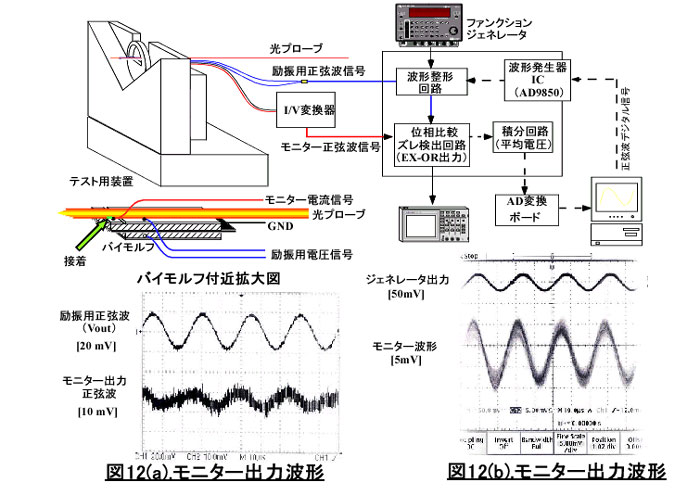
| [目的] | 私たちの研究目的は光プローブと試料との距離をリアルタイムに測定することです。以前はロックインアンプを用いてシアフォースの検出を行っていましたが、シアフォースを検出した時にデータを読み出す時間が遅く、光プローブの制御に時間がかかりすぎ、リアルタイムでの測定が不可能なのでシアフォース検出をさらに高速化する回路を作りました。 私たちはこの回路を用いて正弦波電圧を出力し、バイモルフをゆらし、実際のゆれをモニターし比較することで位相のズレを検出します。 |
 |
|
|
 |
|
|
|
 |
|
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|