
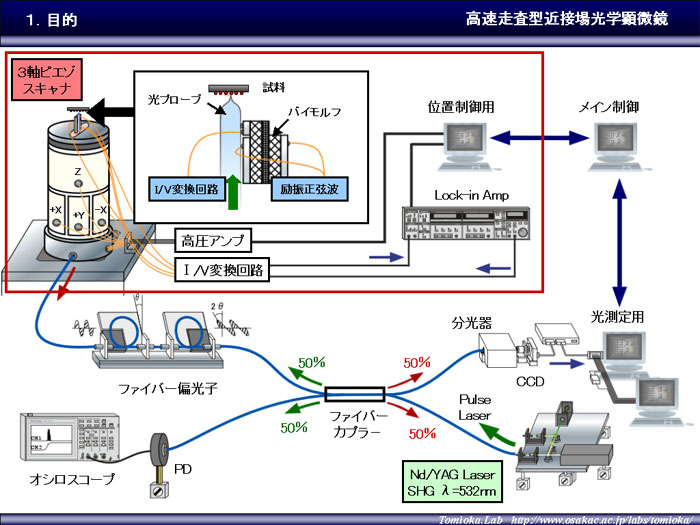
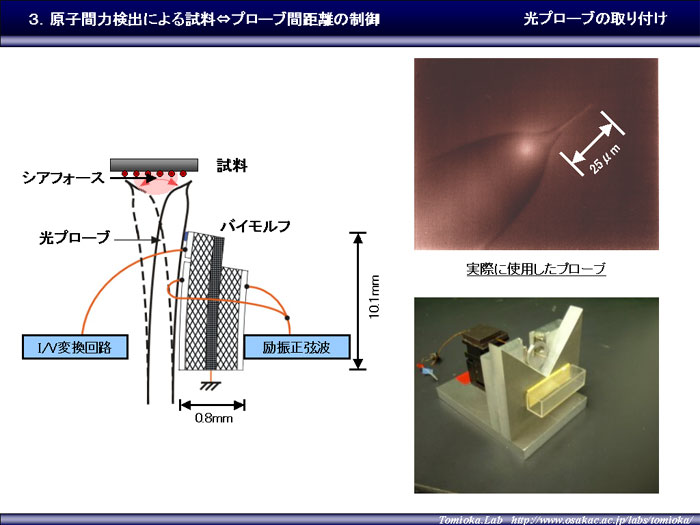
原子間力検出による近接場光学プローブの位置制御
 |
|
|
 |
|
|
|
 |
|
|
|
|
 |
|
|
|
 |
|
|
|
 |
 |
|
|
 |
|
|
|
 |
|
|
| ■■■■ おまけ(VisualBasicとMatlabでリアルタイム測定サンプル) | |
 |
 |
| (簡単な説明) リアルタイムで測定値をグラフにプロットして行くといったプログラムを組みました。今回、取り上げた画像アニメーションはサンプルで作り直した低機能版です。左ウインドウがMatlabでプロットしているもので、右ウインドウがVisualBasicで測定をコントロールしているものです。右ウインドウのテキストボックスが変わるごとにMatlabにプロットコマンドを送っています。実際の中身は、VisualBasicでGPIBからデータ取得して、Visual C++ DLLで共有メモリ(Shared Memory)にデータを書き込み、MatlabのMex C DLLで先ほど書き込んだ共有メモリのデータを読み取り、Matlabの必要なプロットコマンドをM-Fileにまとめおき、Visual Basicのテキストボックスが変わるとM-Fileを実行しプロットするといった事を内部的に行っています。 いろいろ試みた結果、以上のような方法でリアルタイム測定するプログラムになりました。実際、さらに良い方法があるかもしれません。参考までに・・・。 |
|
| ■■■■ | |