-偼偠傔偵-
丂杮尋媶偱偼傾僶儔儞僔僃僼僅僩僟僀僆乕僪乮埲壓俙俹俢偲屇傇乯傪巊梡偟偰旝庛岝寁應傪峴偆丅俙俹俢偺儊儕僢僩偼専弌尷奅偑撉傒弌偟夞楬偱寛掕偝傟偰偄傞応崌偵丄専弌尷奅傪俙俹俢偺憹攞棪暘偩偗掅偄儗儀儖偵堷偒壓偘傜傟丄捠忢偺僼僅僩僟僀僆乕僪偺亊10偐傜亊100偵姶搙傪岦忋偱偒傞偲偙傠偵偁傞丅偟偐偟傾僶儔儞僔僃憹攞夁掱摿桳偺摑寁揑側備傜偓偵傛傞夁忚嶨壒偑敪惗偡傞丅媡僶僀傾僗忬懺偺APD 偵偍偄偰偼丄岝偑擖幩偟側偔偰傕丄嬐偐側偑傜埫揹棳偑娤應偝傟傞丅摿偵岝巕堦偮偁偨傝偺僄僱儖僊乕偑彫偝側挿攇挿偺岝偵懳偟偰姶搙偺崅偄岝専弌慺巕偵偍偄偰偼丄擬側偳偵傛傝梕堈偵埫揹棳偑惗偠傞偺偱丄攇挿偺挿偄岝偺専弌偺忈奞偵側傝傗偡偄丅杮尋媶偱偼俙俹俢杮懱偵儁儖僠僄慺巕傪巊梡偡傞偙偲偵傛傝壏搙惂屼偟丄憹暆棪丒埫揹棳傪堦掕偵偡傞偙偲偵傛傝弌椡傪埨掕偝偣傞偙偲傪栚揑偲偡傞丅
|
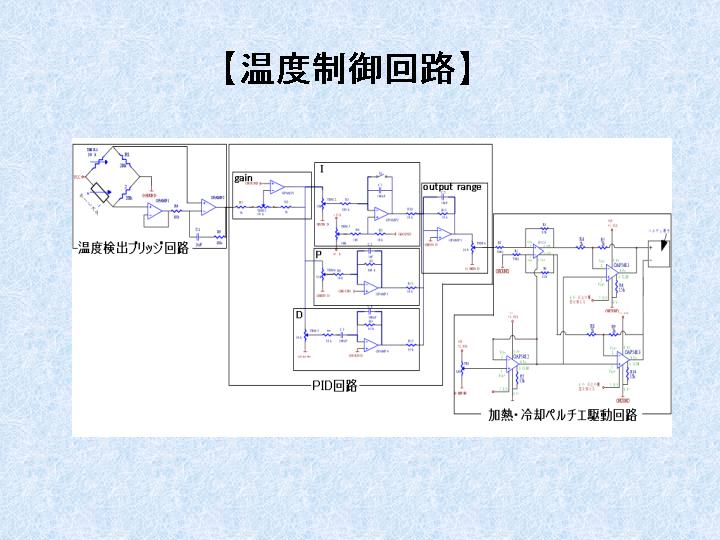 |
丂壏搙惂屼夞楬偼壏搙専弌僽儕僢僕夞楬丄PID惂屼夞楬丄壛擬丒椻媝儁儖僠僄嬱摦夞楬偺俁僽儘僢僋偵暘偐傟傞丅
|
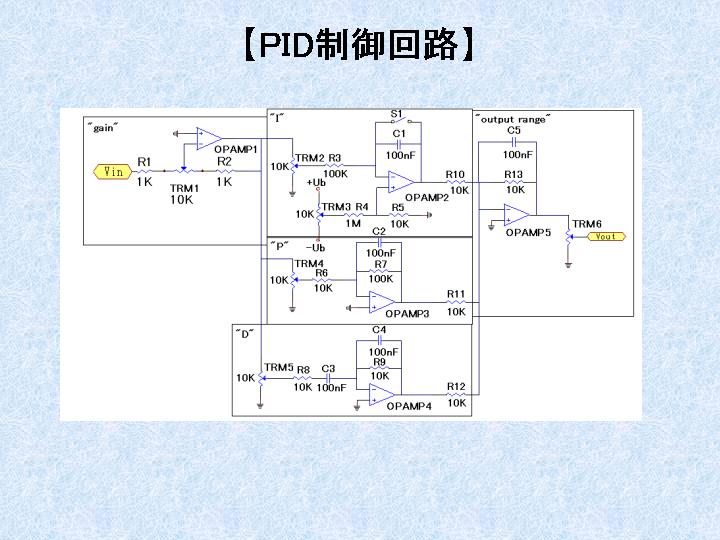 |
丂俹俬俢偲偼P乮斾椺乯丄I(愊暘乯丄D乮旝暘乯偺俁偮偺慻傒崌傢偣偱惂屼偡傞傕偺偱栘栚嵶偐側惂屼傪幚尰偱偒僗儉乕僘側惂屼偑壜擻偲側傞丅
丂摿偵弶婜愝掕帪偵I傪OFF偵偱偒丄愝掕壏搙傊偺摓払傪懍偔偱偒傞丅
|
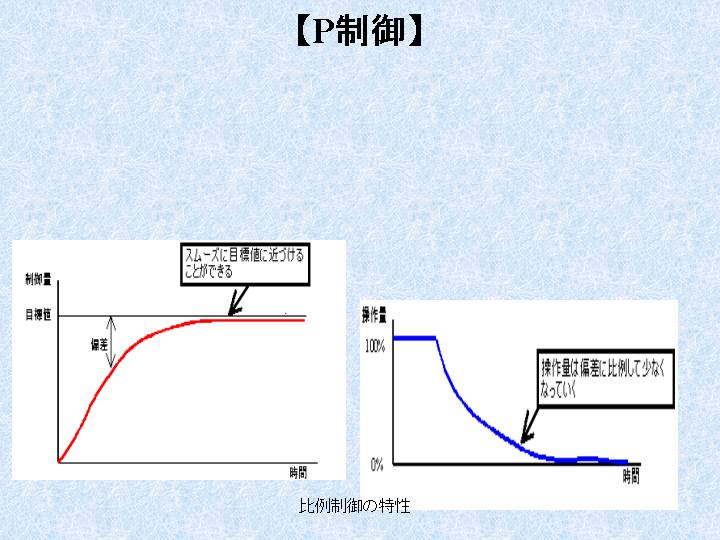 |
丂憖嶌検傪栚昗抣偲尰嵼抣偲偺嵎偵斾椺偟偨戝偒偝偲偡傞傛偆偵偟偰丄彊乆偵挷愡偡傞惂屼曽朄丅
丂栚昗抣偵嬤偯偔偲旝柇側惂屼傪壛偊傞偙偲偑弌棃傞偺偱嵶偐偔栚昗抣偵嬤偯偗傞偙偲偑壜擻偲側傞
|
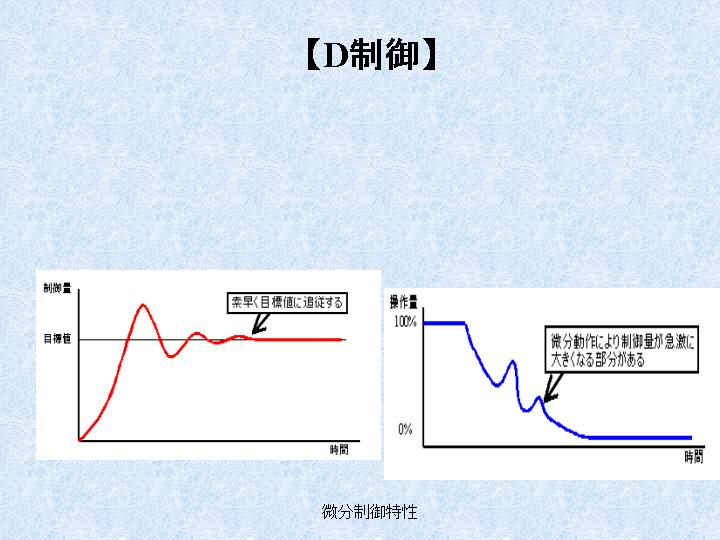 |
丂惂屼墳摎傪懍偔偡傞丅
丂奜棎偑偁偭偨帪偺墳摎惈擻偑椙偔側傞丅
丂媫寖偵婲偒傞奜棎偵懳偟丄慜夞曃嵎偲偺嵎偑戝偒偄帪偵偼丄巚偄愗偭偰憖嶌検傪懡偔偟婡晀偵斀墳偡傞丅
|
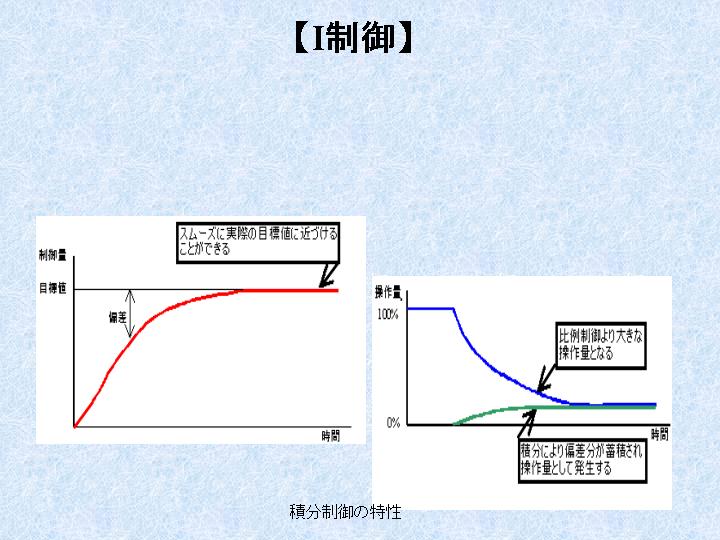 |
丂憖嶌検偑彫偝偔側傝偡偓偰偦傟埲忋嵶偐偔偼惂屼弌棃側偄丅偙偺巆棷曃嵎傪柍偔偡丅
丂巆棷曃嵎傪帪娫揑偵椵愊偟丄偁傞戝偒偝偵側偭偨強偱憖嶌検傪憹偟偰曃嵎傪柍偔偡丅
|
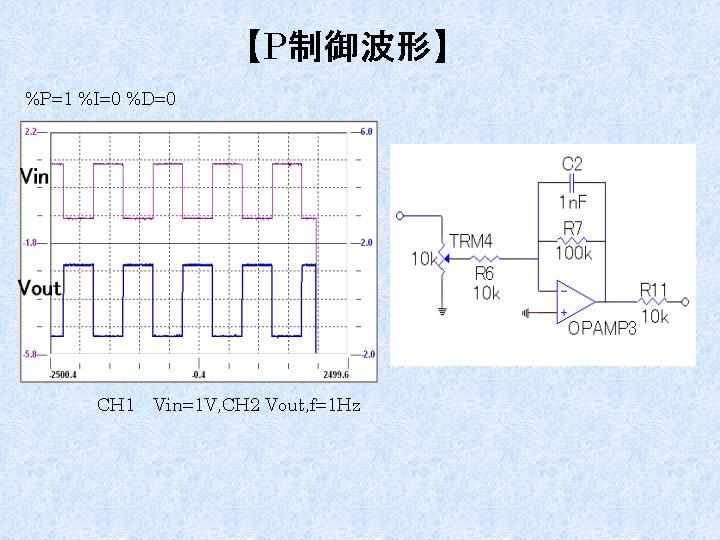 |
丂俿俼俵2,5傪嵟戝傑偱峣傝(%I=0,%D=0)TRM4傪奐偒(%P=1)斾椺憹暆偺傒嵦梡丅
丂扨弮偵斀揮憹暆偟偨攇宍偑弌椡偝傟偰偄傞偺偱斾椺憹暆偺攇宍偲偄偊傞
|
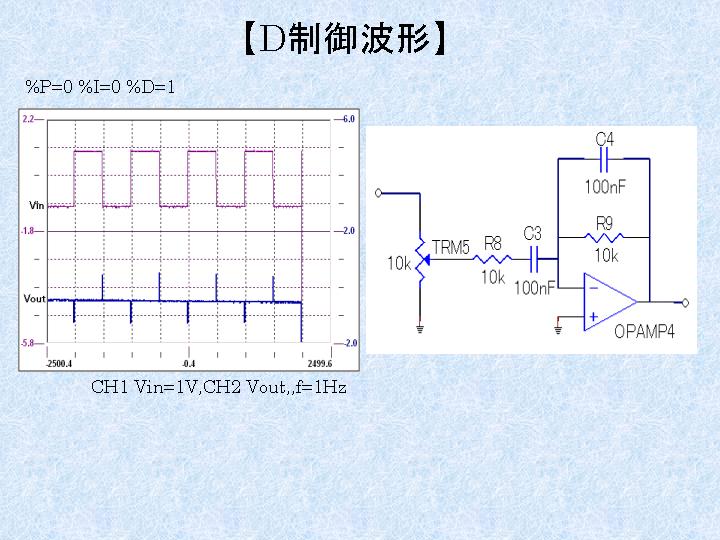 |
俿俼俵2,4傪嵟戝傑偱峣傝(%P=0,%I=0)TRM丂5傪奐偒(%D=1)旝暘憹暆偺傒嵦梡丅
丂曽宍偺僾儔僗偐傜儅僀僫僗偺抣偵曄壔偡傞偲偒偑90亱偵嬤偄孹偒偑堦弖偩偗旝暘偝傟偰僷儖僗偲側偭偰偄傞偺偑傢偐傞丅
|
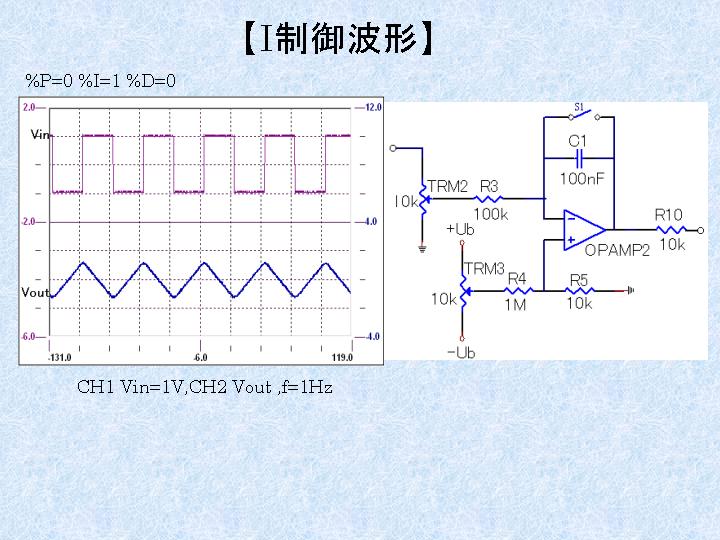 |
丂TRM4,5傪嵟戝傑偱峣傝(%P=0,%D=0)TRM2傪奐偒(%I=1)愊暘憹暆偺傒嵦梡丅
丂擖椡偝傟偨曽宍攇偐傜嶰妏攇偑弌椡偝傟偰偄傞偺偱愊暘偑幚尰偝傟偰偄傞偲偄偊傞丅
|
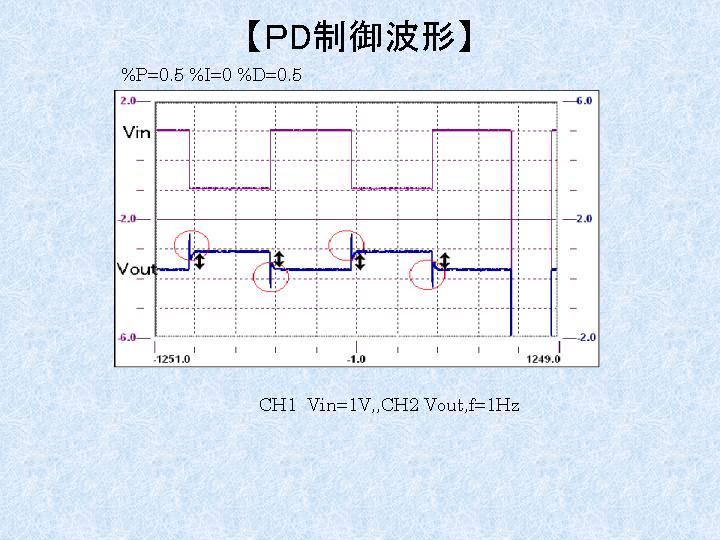 |
丂TRM2傪嵟戝傑偱峣傝(%I=0)TRM4,5傪奐偒(%P=0.5,%D=0.5) 斾椺憹暆偲旝暘傪嵦梡丅丂弌椡偑扨弮偵憹暆偟偨攇宍(栴報)偲旝暘攇宍乮仜乯偲偺懌偟嶼偲尒偰傢偐傞丅
|
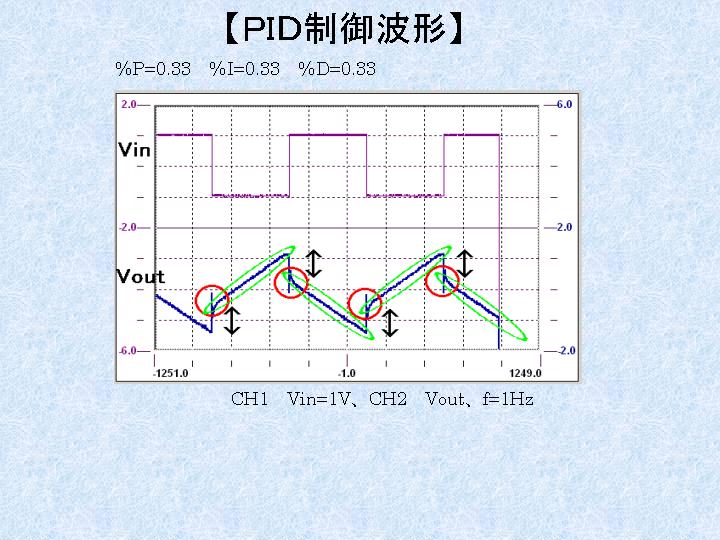 |
丂TRM2,4,5傪奐偒斾椺,愊暘,旝暘晹傪摨偠検偵偟偨応崌偱偁傞丅偦傟偧傟偺攇宍偺摿挜傪偁傢偣傕偮斾椺憹暆(栴報)丄旝暘乮仜乯丄愊暘乮懭墌乯偑懌偝傟偰偄傞偲偄偊傞丅
埲忋偱PID夞楬偺摦嶌僥僗僩偑姰椆偟丄惓忢摦嶌偑妋擣偱偒偨
|
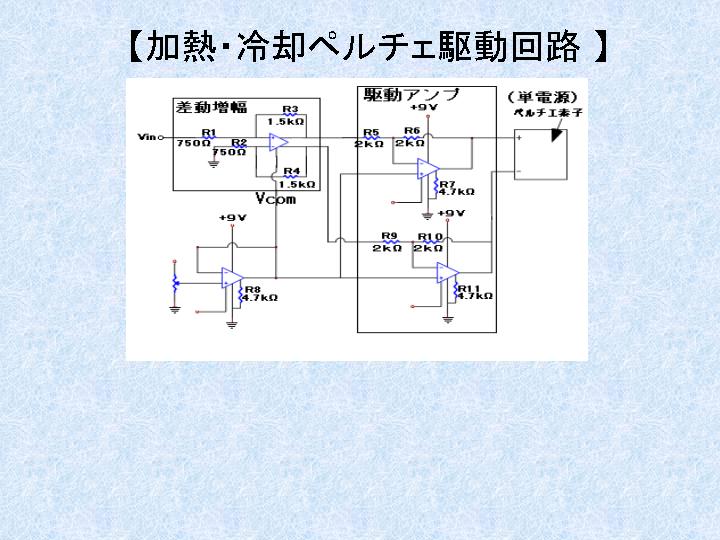 |
丂儁儖僠僃慺巕憃曽岦偵揹棳傪棳偟壛擬丒椻媝傪峴偄丅儁儖僠僄慺巕偑摦嶌偟偰偄傞偺傪妋擣偟偨丅
|
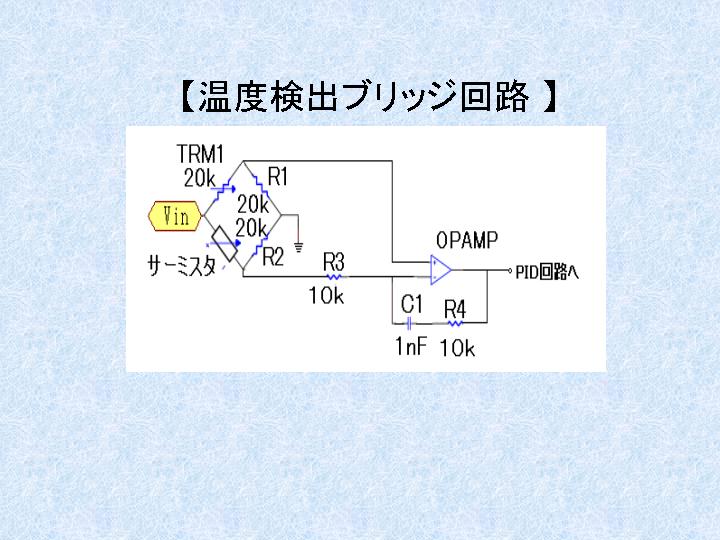 |
丂僽儕僢僕夞楬偵僒乕儈僗僞傪偲傝偮偗揹埵嵎偲偟偰壏搙嵎傪撉傒庢傝丄壜曄掞峈偱壏搙傪愝掕偡傞丅
|
 |
寢壥
俁偮偺夞楬傪嶌惢偟慻傒崌傢偣偰儁儖僠僃慺巕偺壏搙惂屼偡傞偙偲偵惉岟偟偨丅
|
 |
崱屻偺揥朷
壏搙惂屼夞楬傪梡偄偰傾僶儔儞僔僃僼僅僩僟僀僆乕僪偺埫揹棳偺備傜偓偑傎偲傫偳侽偵側傞偐傪妋擣偡傞丅
|
|
