計測制御工学研究室(木村研究室)
 |
動画像計測、ニューラルネットワークをベースとする生体システム、アクアバイ
オメカニズム、計測の推定問題などの研究を行っています。 ■主な研究テーマ - 脳の情報処理モデルの構築 - カエルの推進メカニズム解析 - クリーンルーム内の汚染源の推定 - スポーツにおけるヒトの運動解析 ■研究室ホームページ: 計測制御工学研究室 |
光集積工学研究室(岸岡研究室)
 |
当研究室では、導波路と言う狭い領域に閉じ込められた少し変った光の特性や
それを巧みに使った新しい光デバイスや光センシング技術を研究しています。 ■主な研究テーマ - 光による光の直接増幅 - 拡散光子密度波(DPDW)による散乱体内部の探査 - 光学非線形性を利用した高速光スイッチ - 光による位置のセンシング - 光分波器(波長多重光通信用デバイス) - 超音波の音場合成 |
超精密加工研究室(田中研究室)
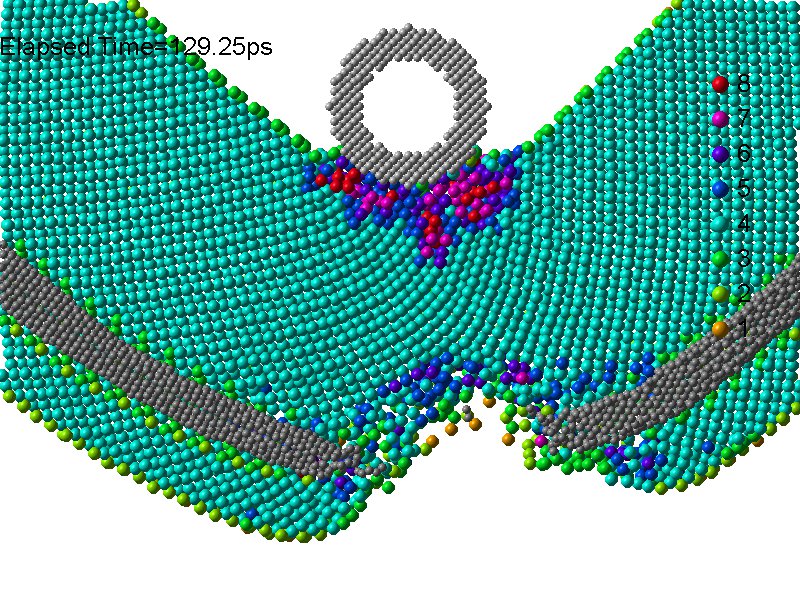 |
超精密ダイヤモンド切削による極微小なクラックも生じない延性モード加工の
実現、分子動力学法という原子モデルによる原子レベルでの変形・破壊の様子の解析、動力無しで坂道を下る
受動歩行ロボットの研究開発を行っています。 ■主な研究テーマ - 超精密ダイヤモンド切削 - 分子動力学法による加工法の研究 - 受動歩行ロボットの開発 ■研究室ホームページ:超精密加工研究室 |
電子制御工学研究室(竹田研究室)
 |
キャパシタ蓄電システム,急速充電システム,ロボット用電源,屋外センサー用独立
型電源などの研究・開発を行っています. ■主な研究テーマ - キャパシタ蓄電システム - 急速充電システムとその応用 - ロボット用電源 - 屋外センサー用独立型電源の開発 - 人工衛星用電源の開発 ■研究室ホームページ:電子制御工学研究室 |
光ファイバ工学研究室(森下研究室)
 |
光ファイバが通信,計測,レーザー加工などに利用されるようになり,色々な光
デバイスが必要となっている.中でも,光ファイバを用いた光デバイスは,低損
失性と光ファイバとの整合性,安定性など多くの優れた特長をもっており注目を
集めている.本研究室では,様々な光デバイスの光ファイバ化を目指して研究を
進めている.また,光デバイスを製作するための製作法(ガラス構造変化法)を
創案し,様々な光デバイスの創出とその特性調節に取り組んでいる. ■主な研究テーマ - 光ファイバカプラ(偏光分離,波長分離,波長無依存)の研究 - ガラス構造変化法による光デバイスの製作と特性調節 - 光ファイバグレーティングの研究 ■研究室ホームページ: 光ファイバ工学研究室 |
CAD工学研究室(新関研究室)
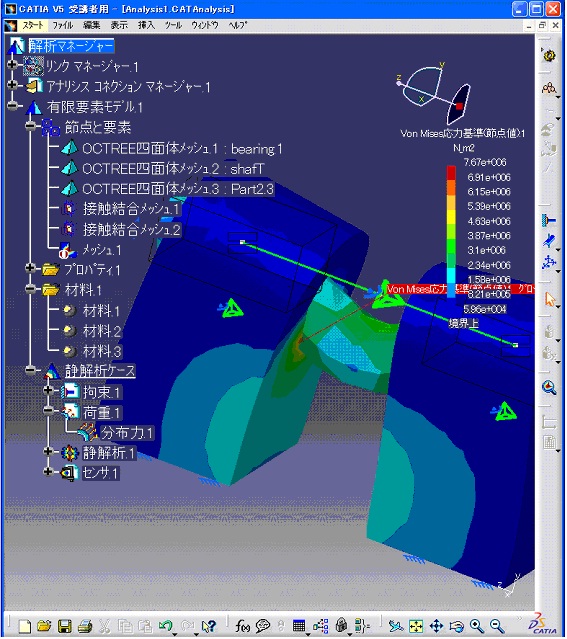 |
本研究室では,3次元CADが世の中で安く使用でき、安定したソフトウェアとして多くのエンジニアに利用
できるようにするためのさまざまな技術の開発に取り組んでいる。3次元CAD内部での形状の表現技術、幾何計算の理論、
3次元CADによる設計のさまざまな応用の技術の開発を含む研究を行っている. ■主な研究テーマ - 細分割曲面による立体表現手法の研究 - 幾何計算の過程での誤差を排除する研究 - 3次元CADと有限要素法解析によるコンロッド設計手法の開発 - 3次元CADによるワイヤハーネスの設計技術の研究 - 3次元CADによるワイヤハーネスの設計技術の研究 ■研究室ホームページ: CAD工学研究室 |
ロボット工学(入部研究室)
 |
モータが無くても人間のように歩くことができる受動的動歩行ロボットの研究、
移動ロボット、マニピュレータ等いろいろなロボットの研究を行っています。
ロボットの研究を行っています。
■主な研究テーマ - 2脚~3脚の受動的動歩行ロボット - 酸素ボンベ搬送ロボット - 人間とジェスチャーで意思相通を行うマニピュレータ ■研究室ホームページ:ロボティクス・メカトロニクス研究室 |
人支援ロボットシステム研究室(鄭研究室)
 |
人を傷つけることなく様々な日常生活をサポートする
パワーアシストマニピュレータ、パーソナルモビリティ等の安全で機能性の高い人支援ロボット
システムの研究開発を行っています。 ■主な研究テーマ - 日常生活支援パワーアシストマニピュレータ - 人搭載型パーソナルモビリティー - 倒立振子型作業支援ロボット - 高信頼ロボット安全要素技術 ■研究室ホームページ: 人支援ロボティクス研究室 |