
大学院 工学研究科 制御機械工学コース 教授
東北大学
好奇心旺盛でいろんなことを同時並行で進行。時間コントロールの極意は早起きで、朝は大学の門が開くのと同時に出勤することも。大学発ベンチャーで起業した、合同会社S-coRT技研の代表を兼務する、多忙な日々。それでも「研究は楽しいので、ストレスはたまらないし疲れません」
人とロボットは共存できる!?
人に接して働くロボットの開発
人のそばで仕事をするロボットも見かけるようになりましたが、人に触れたり、何かを受け渡したり、人と直に接するロボットの実用化はまだまだです。それは、安全性の確保とパフォーマンスを両立させることが、現在の技術でもまだ難しいから。
鄭研究室ではこの難題に挑戦し、働くロボットの開発を進めています。
ロボット大会への出場で
最先端技術を検証
鄭研究室で取り組んでいるのは、ロボット技術を応用した電動車椅子の開発です。その成果を試すべく、国際大会「サイバスロン」に出場。大会では、ロボット工学研究者と障がい者が協力し、日常生活に必要な動作を織り込んだコースでスピードを競います。ここで求められるのは、障がい者パイロットを乗せた状態で傾斜のある道や階段をスムーズに上り下りできるパワフルさ。さらにロボットアームでドアを開け閉めするきめ細かな動き。相反する動作をいかにコントロールするか。次の目標は、2024年開催のスイス大会です。
また、コンビニの業務をこなす作業ロボットの開発にも挑戦中。接客、トイレ掃除、陳列・賞味期限切れ商品の廃棄という3つのタスクを競う大会では、接客とトイレ掃除の2つのタスクで2位を獲得しています。なかでも、接客タスクに搭載したシステム「賞味期限が迫っておりポイントがより多く加算される商品をお客さんに勧める」という機能が、フードロス削減や収益改善につながると高い評価を受けました。
大学ベンチャーでロボット技術を
インフラや福祉に社会実装
鄭研究室にとってさまざまなロボット大会への出場は、研究してきた技術を実際のものづくりで検証する格好の機会です。2022年からは大学ベンチャーを創設し、ロボット技術の社会実装を本格的に進めています。
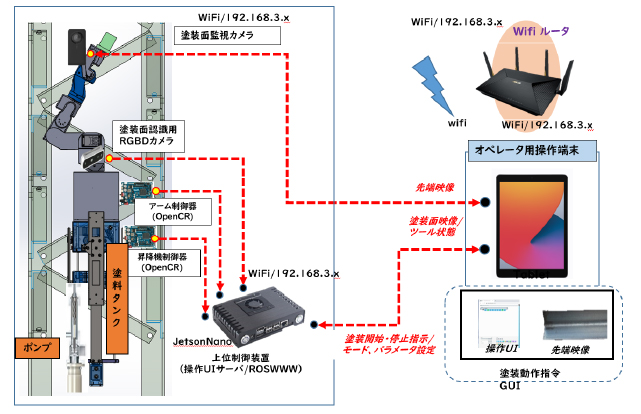
たとえば、鉄道会社と共同で手掛けているのが、鉄道架線を支える鉄柱の塗装ロボットの開発です。高さ10メートルもある鉄柱を定期的に再塗装するメンテナンス作業を自動化し、効率化やコストダウンにつなげています。
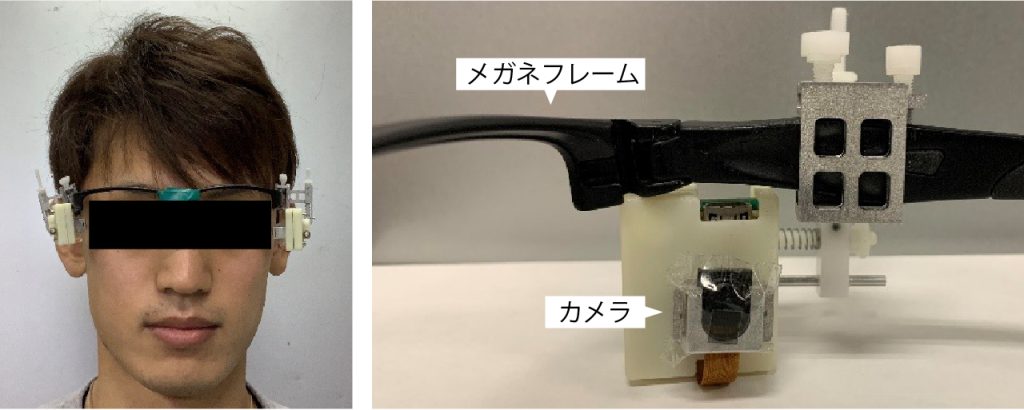
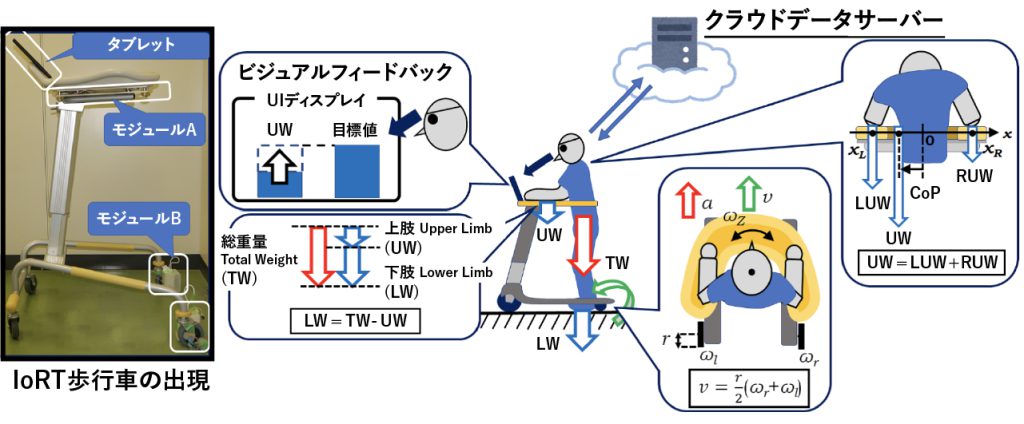
また、歩行能力のリハビリテーションを支援する歩行訓練システムも開発中。搭載したカメラを使って歩く足元の動きを解析し、足を上げる高さ、歩幅、歩隔、速度などを計測。最終的には、理学療法士の代わりにロボットアームが骨盤を支持し、歩行訓練を補助できるようにするのが目標です。

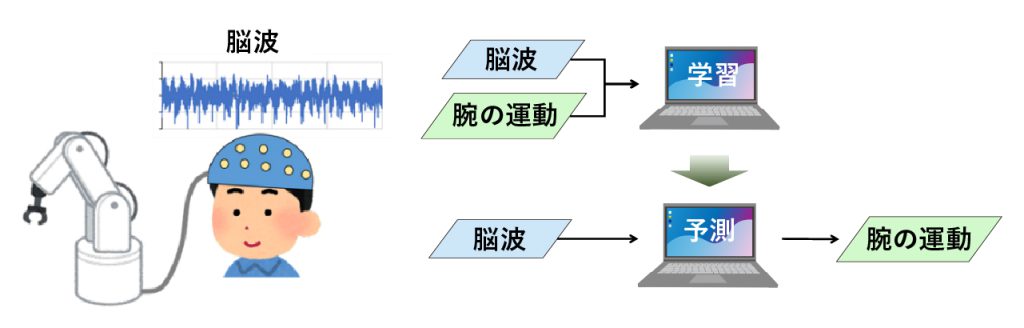
両足に赤いマーカーをつけ,歩行器に取り付けたカメラで赤いマーカーを認識,中心位置を計測し,両足の運動を推定する.
ロボット開発の未来は
人とロボットが理解し合う世界!?
ロボットの安全性が高まり人のサポートができるまでに進化すると、この社会はどう変化するのでしょうか。
ロボットが人にできないことをする社会では、人とロボットは共助し合う関係になります。単にロボットの安全性が確立しているというだけでなく、人がロボットの隣で安心して暮らせるかどうかが重要になるかも。安心は人の気持ちの問題。人とロボットが相互に思考-動作を理解する、という視点でロボット開発が進む日は意外に近いのかも知れません。

各種取材や研究に関することなど、
お気軽にお問い合わせください