
大学院 工学研究科 制御機械工学コース 准教授
大阪電気通信大学
電機メーカに勤務後、高校教諭として教壇に立つ傍らで学位を取得。その後、大学教員に転身。それと並行して大学発ベンチャー「S-coRT」の執行社員として回路設計を行う、多様な経歴の持ち主。学生時代から続けるベースギターはブルース中心にライブ活動を継続中。
IoT、ロボット技術で
社会問題を解決するものづくり
小川准教授の研究テーマは、センサ計測により収集したデータをIoTで効率的に活用する――そんなスマート社会の構築に役立つ技術です。福祉、教育、農業など私たちの暮らしに近い幅広い領域を守備範囲に、社会問題を解決するものづくりに挑戦しています。
詳細な歩行データの計測で
リハビリテーションをサポート
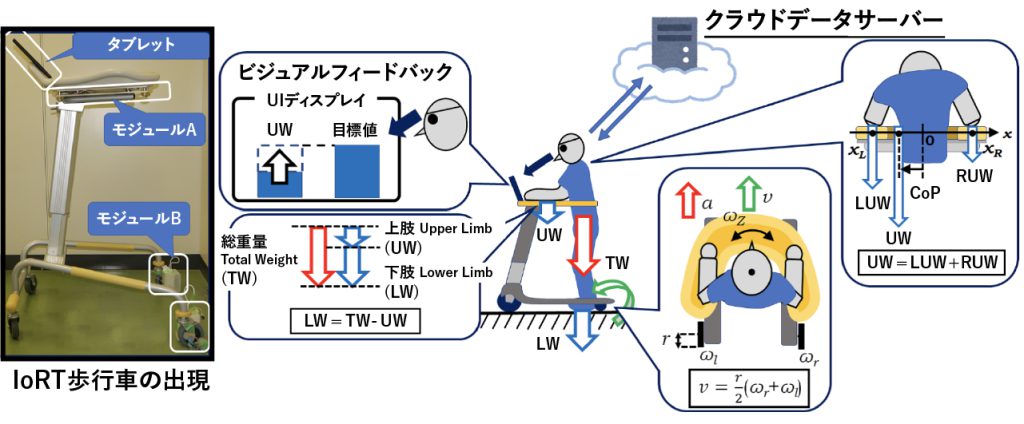
小川准教授が現在取り組んでいるのは、歩行データ計測システムの開発で、学内外の研究室や理学療法士と共同で取り組んでいます。高齢者や歩行障害のある人の歩行能力の維持、改善のためのリハビリテーションには、歩行の正しい評価や安全性の確保が重要です。しかし、現状の評価は、経験や知識が十分な理学療法士でないと評価が難しく、無理な訓練を行った場合には転倒のリスクもあります。
研究室では、歩行をサポートする歩行車に最小限のセンサを実装した計測システムを考案。訓練中の歩行速度、歩行周期のほか、足にかかる力や歩幅、「かかとがついた」「つま先が離れた」などの動作、重心の移動など詳細なデータを自動的に算出・表示できる機器を開発しています。
今後は詳細な歩行データと重心の移動や左右のバランスから歩容変化を検知して分析する手法の開発を予定。さらに、仮想空間に患者(人)と歩行車や環境(モノ)のデジタルツインを構築し、訓練中の歩行パラメータから挙動を解析・評価する手法を確立して、現実空間の起こり得る、または起き得た事象を予測して適切な訓練内容を逐次提示できるシステムの開発を目指します。
将来的に予測される理学療法士不足にも、DX(Digital Transformation)で対処し、効率的で効果的な歩行訓練の実現につなげたいと考えています。
物理現象を体感できる
新しいロボット教材の開発
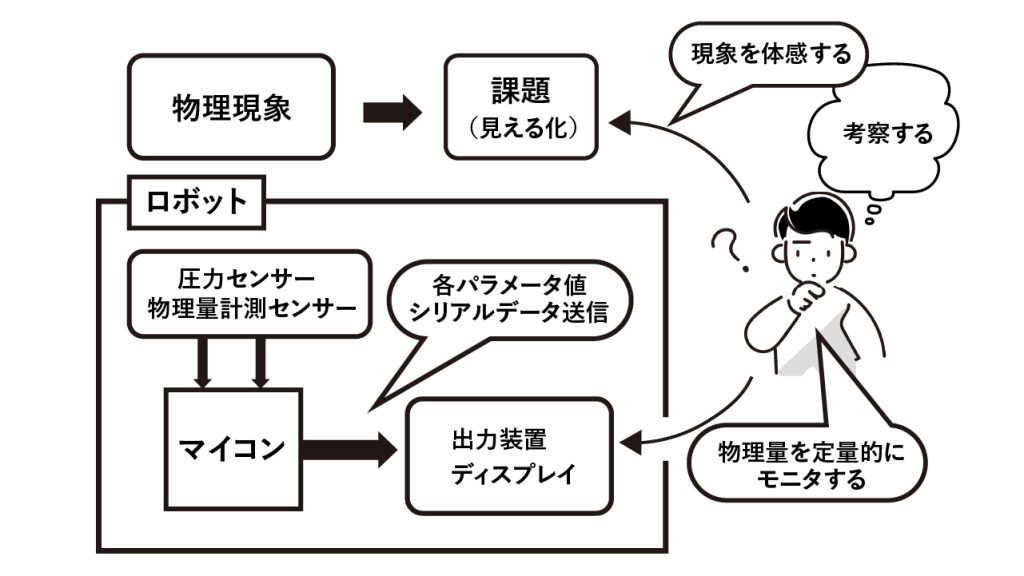
また、IoT技術やロボット技術を使った物理教材の開発にも取り組んでいます。物理を学ぶには、質量、力、エネルギーなどの物理量を正しく認識し、実際の物理現象との関係を理解して数式で表現することが重要です。
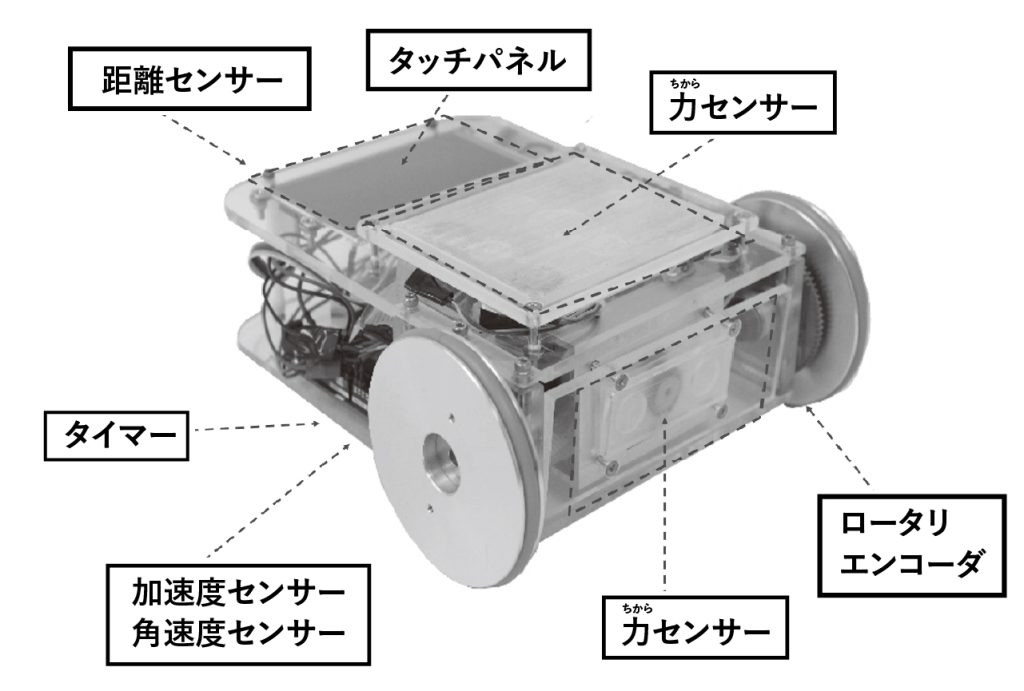
小川准教授は、動くロボットを通して学習する物理現象を体感できるロボット教材を開発。物理学習に最適なセンサを実装したロボット教材は、実験中に計測した物理量と学習する物理公式を同時にリアルタイムにディスプレイ表示。スピード感や重量感を目で見て音で聞きながら体感的に効率的に学習できます。たとえば、摩擦現象の学習では、重さの違うオモリを載せ、滑りにくさの違う床材の上を、ロボットを押して滑らせることで摩擦力の違いを体感できます。オモリの重さや押す力(=摩擦力)はセンサで計測され、その値から摩擦係数が算出。公式と共にディスプレイに表示されます。力の量が変化する様子を見て、物体の質量とはたらく摩擦力の関係を体感的に学習することができます。
実際に高校の授業に導入したところ、生徒からは「実際にロボットが動くので現象をイメージしやすい」「楽しみながら学べる」など、物理を体感する効果を示すような意見が寄せられました。
データ分析で一人ひとりにあった
最適なプログラムを提案!?
今、IoTで集めた現実空間のデータを仮想空間で分析し、最適な結果を導き出して現実世界にフィードバックする、サイバーフィジカルシステムという考え方が注目を浴びています。
小川研究室の歩行車による計測システムやロボット教材も、いずれは一人ひとりに最適な歩行訓練プログラムや物理教育プログラムとして提供できるようになるかもしれません。IoTやロボット技術は、幅広い分野の問題を解決する可能性を秘めた期待の技術です。

各種取材や研究に関することなど、
お気軽にお問い合わせください