大学院 医療福祉工学研究科 医療福祉工学専攻 教授
富山県立大学
小学3年から始めた書道。ポートレートは第19回宇野雪村賞全国書道展で宇野雪村賞・文部科学大臣賞に選ばれた代表作「進」。前衛書は墨象とも呼ばれ、文字としてではなく造形によって訴える表象の芸術。時間と空間との美的構造の上に新しい造形を打ち立てるものです。作品「進」は書の中心へ、または、中心から溢れ出てくるイメージを表現しています。
人が歩いたり走ったりする
複雑な仕組みを明らかにする
二本足で歩くロボットは、まだまだ身の回りに普通に見かけるというところまではいきません。開発・普及が進まない理由の一つは、人が歩いたり走ったりする仕組みが複雑だから。
藤川教授は、人体の基本的な身体運動やスポーツをするときの動きを、二関節筋に着目し解明しています。
人の動作に重要な役割を果たす
二関節筋の機能を解明
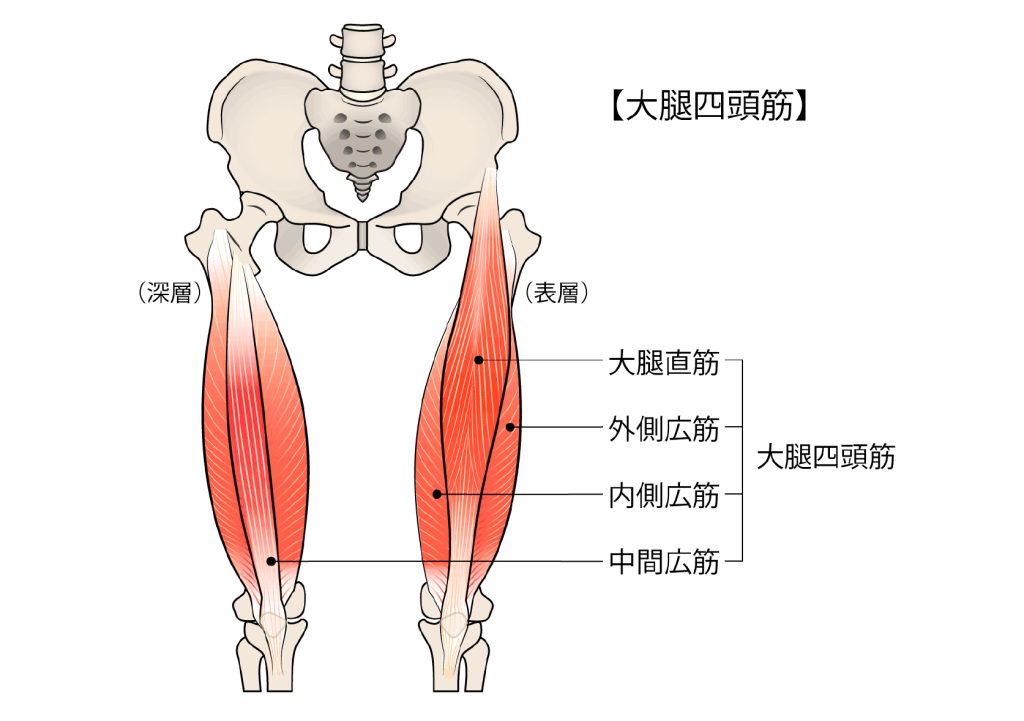
人は立ち上がるとき、股関節と膝関節をそれぞれ伸ばす方向に回転させています。その力を出す源になるのが、股関節を伸ばす大殿筋、膝関節を伸ばす内側広筋、外側広筋などです。
一方で、立ち上がるときにはこれらに加え、太ももの前側にある大腿直筋も活動しています。大腿直筋は、股関節と膝関節の二つの関節をまたぐ二関節筋で、股関節を曲げると同時に膝関節を伸ばす働きをする筋。立ち上がるときの股関節にとっては、相反する動きをします。
藤川教授はこの二関節筋の機能を解明するために、筋電図を使って筋肉の活動を解析。さらに、理論モデルをロボットアームで再現する実験を実施しました。その結果、二関節筋は2つの関節に力を発生させるだけでなく、手足の先端にかかる力や重心を制御する重要な役割を果たしていることが明らかになりました。
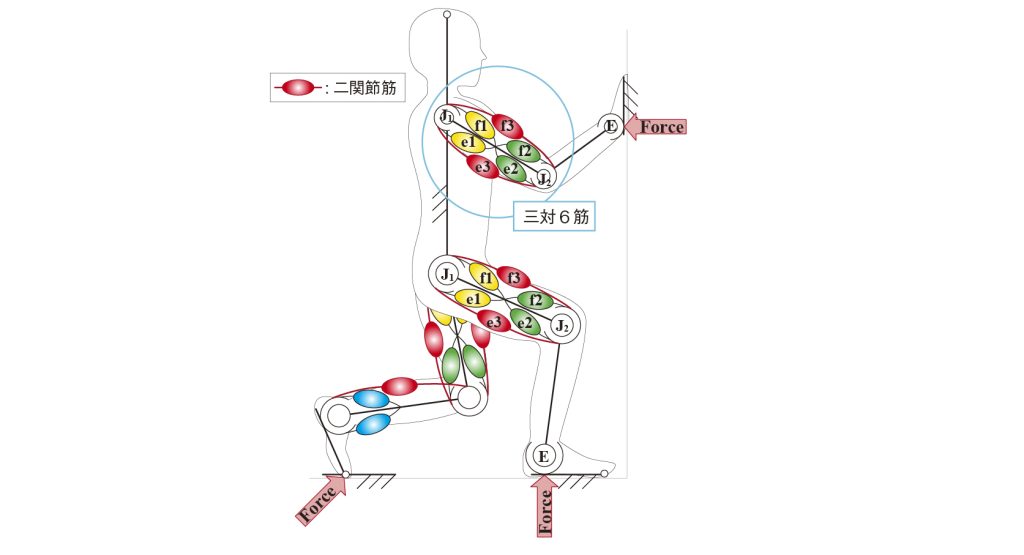
肩関節・股関節J₁では屈筋e1と伸筋f1の一関節筋ペア, 肘関節・膝関節J2では伸筋e2と屈筋f2の一関節筋ペア, J1とJ2に同時に関係する伸筋e3, 屈筋f3の二関節筋ペアの, それぞれ三対6筋が関わっている.この三対6筋が大腿と上腕に存在することで,足底や掌の外力に対して,柔軟に対応できることがわかった.
二関節筋を含む三対6筋の機能を有すると,リンク先端に生じる負荷に対して,柔軟に追従することができるため,機構的効果のみで制御なしに負荷に対応できる.
二関節筋の機能がないと,リンク先端に生じる負荷に対して,先端が滑り,負荷に対応できないため,フィードバック制御が必要となる.
この三対6筋の機能を有する下肢の片脚の機械モデルの跳躍・着地実験によって,バネのみの機構モデル,すなわち,フィードバック制御のような数値制御を利用しないモデルでもヒトのような跳躍・着地が可能であることが実証された.
同じ動きや姿勢でも使う筋が異なる⁉
スノーボード上級者と初級者の筋活動を解析
また最近は、二関節筋の機能に関わる基礎研究をベースに福祉工学やリハビリテーション分野、スポーツ分野にも対象領域を広げています。たとえばスポーツ分野では、テニスでサーブをする時の動作やスノーボードの動作(姿勢)に着目し、運動解析による研究を進めています。
たとえば、スノーボードの動作(姿勢)の運動解析では、上級者と初級者にスノーボードの基本姿勢をとってもらい、筋活動を解析。すると、同じ姿勢をしていても、上級者と初級者では筋活動が全く違うことがわかりました。初級者は筋肉に力が入りすぎていて、二関節筋の生む力を別の筋で打ち消してしまっていますが、上級者は無駄な力を使わず二関節筋をうまく使っていることが明らかになりました。
二関節筋には2つの関節をつなぎ、それぞれの関節が動く力を連動させて、運動を抑制する働きがあります。スノーボードの動作にみられるような、雪上での「揺れ」や不安定な動きに対しても貢献しています。上級者は二関節筋の生みだす力をうまく活かして、安定した姿勢を保っていると考えられます。
藤川研究室では、こうした筋活動の解析などを通し、さまざまなスポーツ競技を効率的に上達するための練習法についても、研究をすすめてゆく予定です。

人のような動きができる
ロボット開発も夢じゃない!?
1秒間に何億回も計算できるコンピュータでも、ロボットの手足を狙い通りに動かすのは至難の業。逆に、人は信号を受けてから実際に動き始めるまでに0.2秒程度かかりますが、位置も力加減も自然に調整できます。突然のアクシデントで近くの人に接触しても、柔軟に対処して大きな怪我等を防ぐことができます。
こうした動きは、どんなふうにコントロールされているのか?身体運動のメカニズムは、まだまだ解明されていない部分が多いのが実際です。優れた人型ロボットの実現には、身体運動の解明がキーになると期待されています。


各種取材や研究に関することなど、
お気軽にお問い合わせください