
大学院 工学研究科 情報工学コース 教授
大阪大学
運動不足解消にゴルフの打ちっ放しに通うも、つい研究者目線になり、飛距離を出すための最適な体の動かし方を考えてしまいます。某プロ野球チームのフォーム解析に提供したプログラムを、ゴルフ版にアレンジして自分用に使おうかと思案中です。
映像や画像から新たな情報を読み取って活用!
深層学習とアルゴリズムで空間の見え方が変わる!
私たちの生きる3次元の世界は、ほぼ全てに幅と奥行きと高さがあります。つまり空間を的確に認識する技術は、世界を制する技術に繋がります。
越後研究室ではプリント基板といった小さな部品からビル等の巨大建築物まで、さまざまな空間に使える技術を研究中です。
2012年、画像認識に革命を起こした
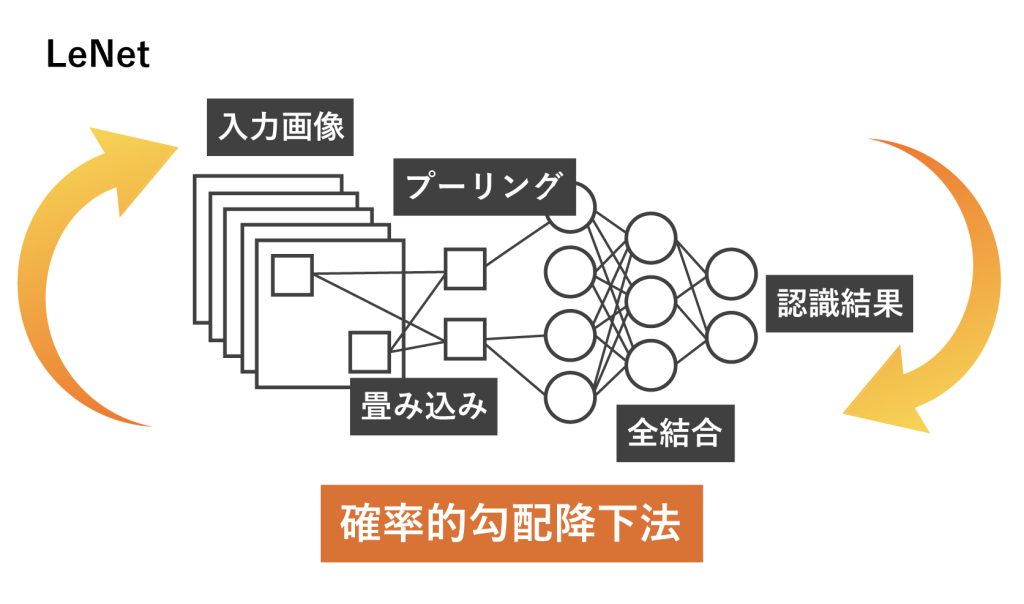
CNN(畳み込みニューラルネットワーク)とは?
「この写真、犬か猫かどっち?」と聞かれれば、子どもでも正確に答えることができます。ところが高性能なAIでも、ひと昔前までこの判断が苦手でした。「○○であり、○○でなければ猫」という風に、猫という結果に導く計算手順=アルゴリズムを、人間がコンピュータに教えていたため、逸脱した例の識別でミスが起きたのです。
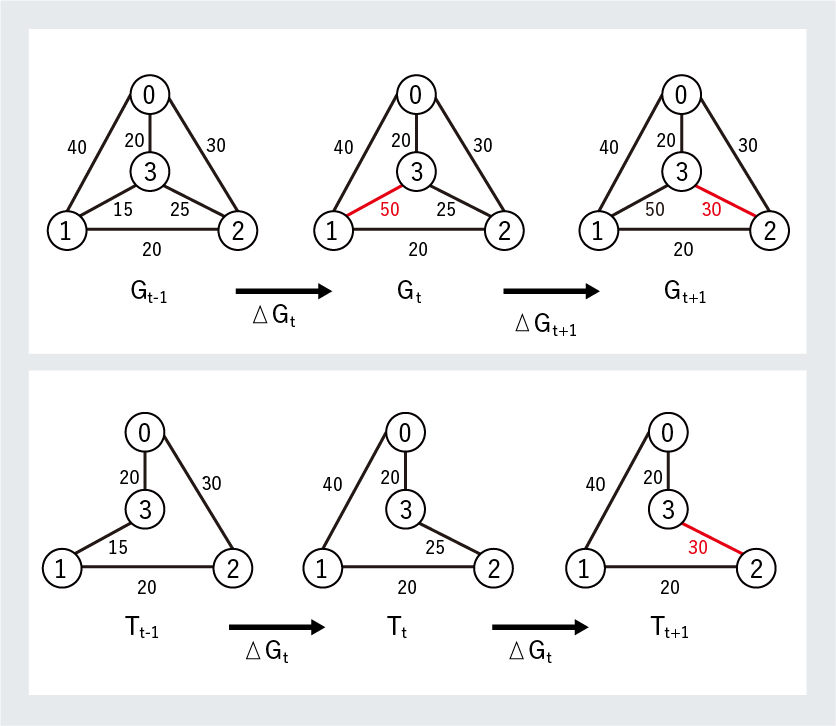
ところが2012年にCNNモデルを使った深層学習が登場します。犬と猫の大量データをAIが読み込み、その特徴を重み付けし、足し合わせた結果をフィードバックして識別する方法です。これにより画像認識の精度は劇的に向上しました。さらに最近話題になっているChatGPTで使われているTransformerを画像にも適用したVision Transformer(ViT) の認識精度が向上し、CNNの認識精度に迫っています。画像は物体を見る方向が異なると大きく変形することが多く、深層学習が登場する以前は、見る方向を離散的なグラフで表現したアルゴリズムが主流でした。
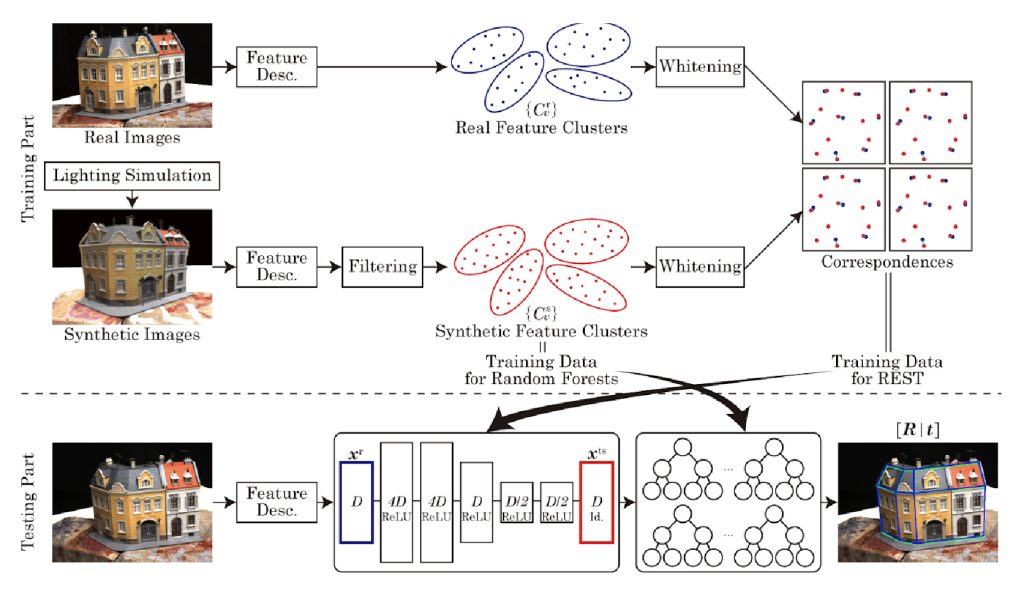
越後研究室では画像・映像認識に関する深層学習とグラフ構造アルゴリズムを組み合わせて、さまざまな技術を研究しています。

基板設計の自動化からリアルタイム障害物回避まで
ワイドなAIの画像認識技術の応用範囲
既に実用化しているのが、本学卒業生が創業者の(株)オンテックのプリント基板の設計システム開発です。越後教授は技術顧問として、この基板設計のプロセスをアルゴリズムでルール化。CADで数日かかった作業を数時間に短縮することができました。今後は深層学習も取り入れた、より複雑な基板設計への対応をめざします。
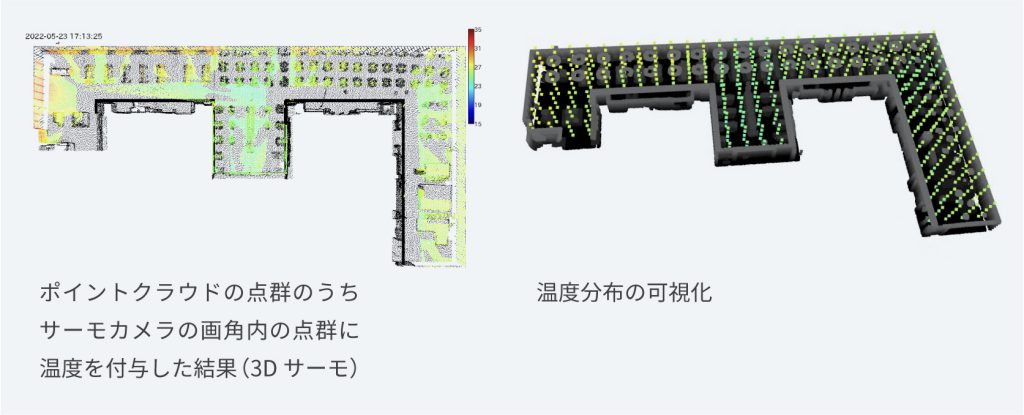
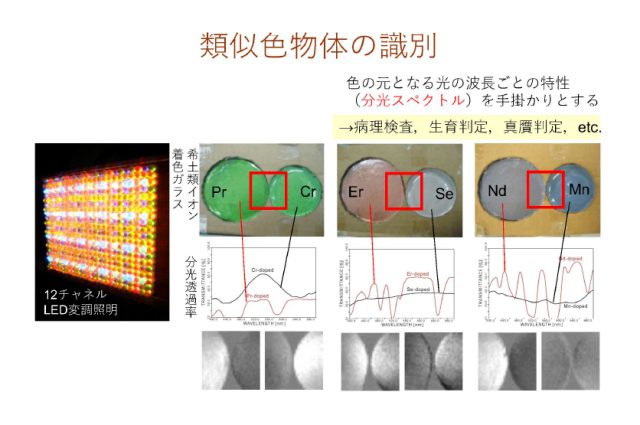
また、サーモカメラと距離センサーのデータを統合した「3Dサーモ」によって、普通は見ることのできない空間内温度分布の可視化を実現。ほかにも、映像中の人物を背景や他の人物と区別して追跡したり、撮影した映像を3DCGとして復元するなど、深層学習を使ったさまざまな技術を開発しています。
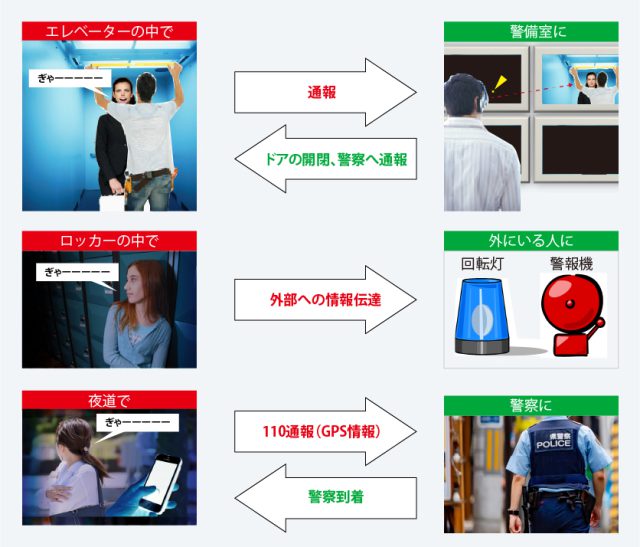
さらに現在、新たに取り組んでいるのが、移動しながらリアルタイムに障害物を検知し、自律的に回避行動を行うロボットの研究開発です。
高層ビルもスイスイ回避して飛行する
「空飛ぶ自律型タクシー」でお出かけ!?
ロボットが自律的に考え動く世界はすぐそこまで来ています。
そこで必要なのは「人間と共生できるロボット」。たとえばリアルタイムに障害物を検知して回避できる自律型ロボットの技術が発展すれば、空飛ぶ自動運転の自動車、病院内での回診、迷子探しなど、さまざまな機能やスタイルが考えられます。
共通して求められるのは、私たちがその存在をロボットではなく人間のようだと感じられるような柔軟な対話性であり、それがAIの大きな課題です。

各種取材や研究に関することなど、
お気軽にお問い合わせください