.jpg)
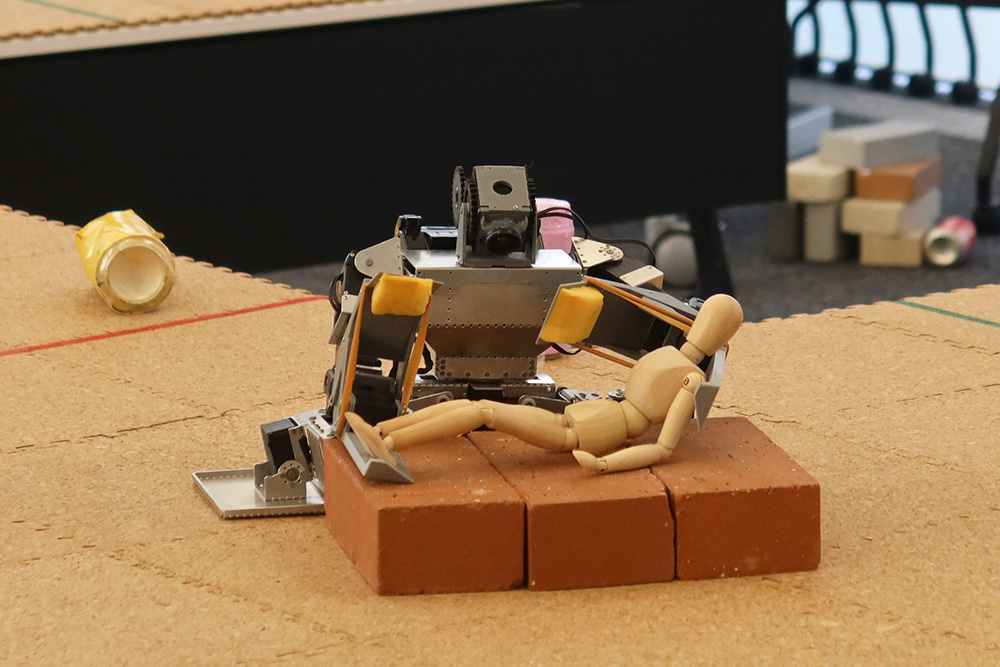

11月3日(日)、寝屋川キャンパスで「ヒト型レスキューロボットコンテスト®2025」(主催:ヒト型レスキューロボットコンテスト実行委員会)が行われ、自由工房の川端虹晴さん(工学部電子機械工学科4年)が搭載カメラ部門1位を受賞し、最高賞となるOECU杯を獲得しました。また、山本晴喜さん(同学科4年)が奨励賞を受賞したほか、本学卒業生2人も搭載カメラ部門3位と目視部門2位を受賞しました。
ヒト型レスキューロボットコンテスト®は災害時の救助活動をテーマに、ヒト型ロボットが障害物をクリアし、要救助者に見立てた人形を救出する競技です。
競技者は遠隔操作でロボットを操作し、約4m×2mのフィールド内で「トンネルくぐり」「段差乗り越え」「ガレキ撤去」「要救助者搬送」の4つのタスクを順にクリアし、所要時間の短さを競います。操作方法により、目視で操縦する「目視部門」と、搭載カメラ映像のみで操縦する「搭載カメラ部門」に分かれます。
搭載カメラ部門1位、OECU杯を獲得した川端さんは「目視部門ではこれまでに1位と3位を受賞したことがあり、総合優勝のOECU杯は今回が二度目なのでとても嬉しく思います。2023年から要救助者のセンサポイントが増え、振動が伝わりやすくなったため、すり足での移動や、腕で救助者を挟みサーボモーターとゴムで優しく救助できるよう工夫を凝らしました。救助者を想定した設計に取り組めたことは良い経験でした。来年からは社会人になりますが、ロボット製作は続け、新たなオリジナルロボットで大会に出場したいです」と今後の目標を語りました。
奨励賞を受賞した山本さんは「設計・プログラム・基板製作を独学で行い、自作ロボットで挑戦したのは今回が初めてでした。特に回路設計に苦労しましたが、授業外の時間をすべて製作に費やし、自分の思い描いたロボットを形にすることができました。リーダーフォロワー制御を採用し、柔軟な動きと扱いやすさを重視したことで、想定外の動きも可能になり、レスキュー工学への新しい提案になったと思います。本番では制限時間内に各タスクをやりきれたので満足いく結果でした。その上、奨励賞をいただけて本当に嬉しかったです。今後は、自分の専門である歩行ロボットの知識を活かしていきたいです」と思いを話してくれました。
本学自由工房では学生による「モノづくり」活動を支援しており、学生の日々の努力が今回のような成果に結びつくよう、これからもサポートを続けていきます。
■大会結果
搭載カメラ部門1位、OECU杯/「ロボット名:山雀」
川端虹晴(工学部電子機械工学科4 年)
奨励賞/「ロボット名:スレイブ1号」
山本晴喜(同学科 4年)
ロボットからIT、ゲーム、医療まで多種多様な学び。
めざす専門分野のスペシャリストとして、未来を切り開ける人へと成長してください。
産業界・官公庁の方々との連携によってさらに広がる学びの世界。実社会に根ざした実のある学びで、即戦力をめざします。
次世代テクノロジーへの学びが詰まった「寝屋川キャンパス」、医療・健康・スポーツ分野の「四條畷キャンパス」をご紹介します。






PAGE
TOP