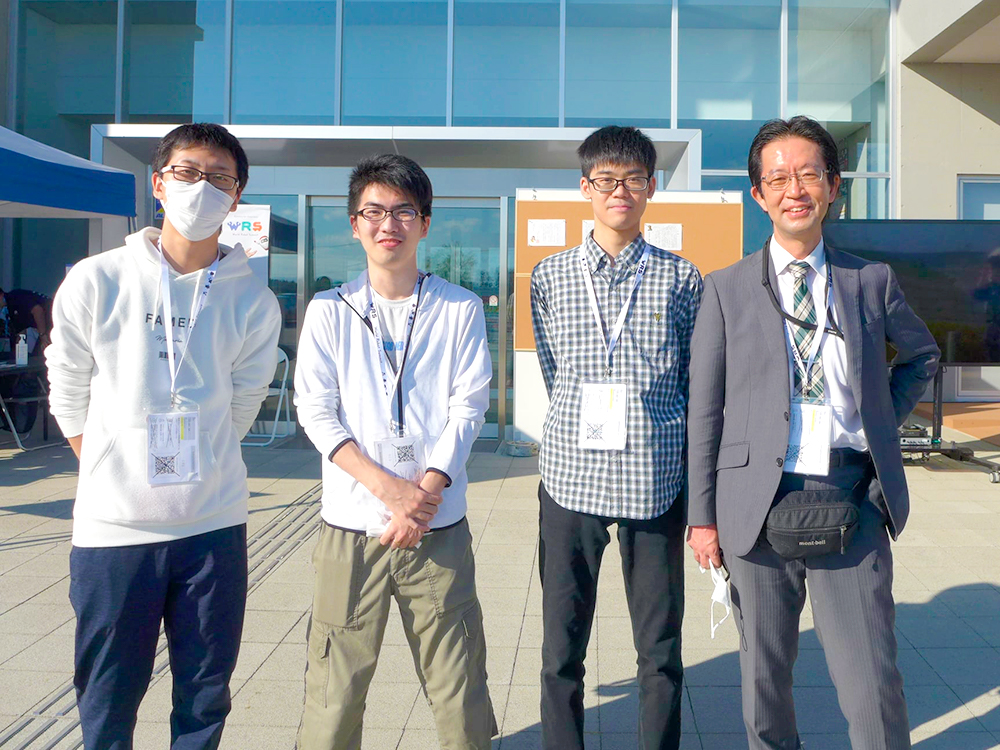
10月8日(金)の日刊工業新聞32面に、本学 総合情報学部 情報学科 升谷保博教授の研究室のODENSチームがWorld Robot Summit 2020(WRS)福島大会のWorld Robot Challenge(WRC)インフラ・災害対応カテゴリー トンネル事故災害対応・復旧チャレンジに出場した様子が掲載されました。
トンネル事故災害対応・復旧チャレンジは、トンネル災害を想定した情報収集、緊急対応をテーマとしており、ロボットシミュレータChoreonoid(コレオノイド)内に再現された災害現場にロボットを投入し、遠隔操縦によりタスクを遂行する能力を競います。
競技では、升谷研究室が提案する「三人称視点ARマスタスレーブ方式」で双腕の建機型ロボットを操縦しました。この方式では、操縦者は、遠隔地のロボットと同じ形で縮小されたロボット(マスターアーム)を操縦します。そして、操縦者は透過型HMD(Head Mounted Display)を装着し、拡張現実感(AR)技術により遠隔地の3次元情報と目の前のロボットが重畳表示された映像を見ながら、ミニチュアを操作する感覚で作業をすることができます。
他のチームとは大きく異なるこの操縦方式は、会場で注目を集めました。
詳しくはこちら
なお、操縦用のロボット(マスタアーム)は、競技に参加した学生が3次元CADで設計し、全ての樹脂部品を本学の3D造形先端加工センターの3Dプリンタで造形しモータの部品と一緒に組み立てたものです。
また、インフラ・災害対応カテゴリー プラント災害予防チャレンジでは、工学部 電子機械工学科の入部正継教授が解説を担当しました。
詳しくはこちら
※この記事は日刊工業新聞社の転載許諾を受けています
※日刊工業新聞 2021.10.8 32面