2024.01.23
計測自動制御学会関西支部・システム制御情報学会シンポジウムで発表
1月12日(金)に大阪工業大学梅田キャンパス(大阪市北区)で開催された、2023年度 計測自動制御学会関西支部・システム制御情報学会シンポジウムで、本学大学院生10人(工学研究科制御機械工学コース入部研究室)が参加し口頭発表を行いました。
計測自動制御学会関西支部とシステム制御情報学会は、若手研究者・技術者の研究活動の促進と相互交流を図るため、これまで共同で若手研究発表会を開催してきました。それぞれの研究活動の促進だけでなく、研究者・技術者の間のネットワーク構築および深化を図ることを目的としています。

.jpg)
発表内容は以下の通りです(副題は省略)
「形状記憶合金を用いた人工筋肉アクチュエータ」
井上大誠(工学研究科制御機械工学コース1年)
「ラズベリー自動収穫ロボットの開発」
神免尚騎(工学研究科制御機械工学コース1年)
「ラズベリー果実の収穫時期判定」
堤稜太(工学研究科制御機械工学コース2年)
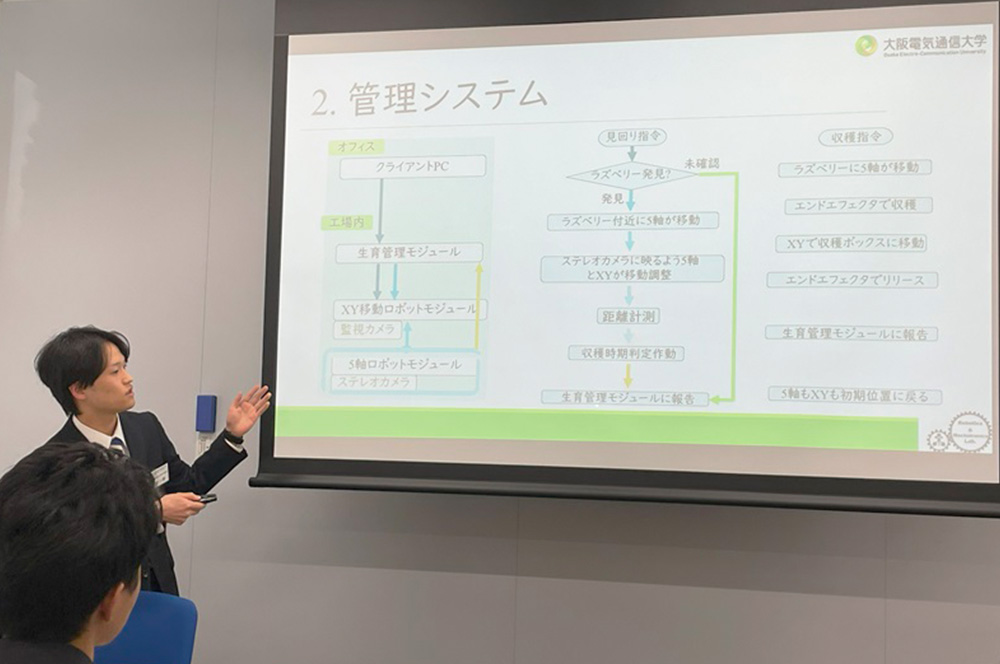
「ラズベリー自動収穫ロボットの管理システムの開発」
永澤一輝(工学研究科制御機械工学コース2年)
「HOT患者の移動支援用ロボティックカート」
林将輝(工学研究科制御機械工学コース2年)
「HOT患者の外出を支援するロボティックカートの制御系設計」
伊吹瞭汰(工学研究科制御機械工学コース2年)
「技術内容を可視化する教材用マニピュレータシステム」
友松竜太郎(工学研究科制御機械工学コース2年)
「受動的動歩行の原理を利用した脚歩行ロボットの歩容の安定化」
乾野啄臣(工学研究科制御機械工学コース2年)
「適応機能を利用したモデルベースな脚歩行ロボット設計」
福田海渡(工学研究科制御機械工学コース2年)
「平地でのリミットサイクル歩行が可能な脚歩行機械の設計」
増岡芳樹(工学研究科制御機械工学コース1年)
参加した大学院生は、発表後の質疑応答で活発な議論を行いました。
2023年度 計測自動制御学会関西支部・システム制御情報学会シンポジウム
.JPG)