工学部
電子機械工学科

電子機械工学科
の記事一覧

2025.06.17
「異分野協働~学科横断型プロジェクト~」中間発表会を開催
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科※)と情報通信工学部1学科(通信工学科)の合同開講科目(3年次)を...

2025.04.17
電子機械工学科が「ジャンプスタート交流会」を開催しました
4月10日(木)、電子機械工学科が寝屋川キャンパス エデュケーションセンター(J号館)で、新入生と4年生による「ジャンプスタート交流会...
.jpg)
2025.02.05
異分野協働エンジニアリング・デザイン演習 研究開発成果展示
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科)と情報通信工学部通信工学科の3年次合同開講科目「異分野協働エンジ...

2025.01.27
第三種電気主任技術者試験合格に向けた試験対策講座がはじまりました
工学部電気電子工学科、電子機械工学科、基礎理工学科で、第三種電気主任技術者試験合格に向けた試験対策講座がはじまりました。1月9日(木)...

2024.12.25
「異分野協働エンジニアリング・デザイン演習」の最終発表会を行いました
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科※)と情報通信工学部通信工学科の3年次合同開講科目を今年度も実施し...

2024.07.19
3年生対象「キャリア設計プロジェクト実践」業界職種研究会合同開催
7月4日(木)と7月11日(木)の2日間にわたり、電子機械工学科・機械工学科3年生対象「キャリア設計プロジェクト実践」の授業の一環で、...
2024.07.02
第36回知能ロボットコンテストに自由工房プロジェクトチームが出場
6月15日(土)、16日(日)の2日間、仙台スリーエム仙台市科学館(宮城県仙台市)で開催された「第36回知能ロボットコンテスト2024...

2024.06.21
「異分野協働~学科横断型プロジェクト~」中間発表会を開催
工学部4学科[電気電子工学科、電子機械工学科、機械工学科、環境科学科※]と情報通信工学部1学科[通信工学科]の3年次合同開講科目を今年...

2024.02.01
「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」研究成果の展示が寝屋川キャンパスOECU Museではじまりました
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科)と情報通信工学部通信工学科の3年次合同開講科目「異分野協働エンジ...
2024.01.23
工学研究科制御機械工学コース入部研究室の学生が2023年度 計測自動制御学会関西支部・システム制御情報学会シンポジウムで発表を行いました
1月12日(金)に大阪工業大学梅田キャンパス(大阪市北区)で開催された、2023年度 計測自動制御学会関西支部・システム制御情報学会シ...

2024.01.17
第三種電気主任技術者試験合格に向けた試験対策講座がはじまりました
工学部電気電子工学科、電気機械工学科、環境科学科で、第三種電気主任技術者試験合格に向けた試験対策講座がはじまりました。1月10日(水)...

2023.12.14
授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」の最終発表会を行いました
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科)と情報通信工学部通信工学科の、合同開講科目(3年次)を今年度も実...

2023.07.17
電子機械工学科・機械工学科 3年生対象の授業「キャリア設計プロジェクト実践」で業界職種研究会を合同で開催しました
7月6日(木)、電子機械工学科・機械工学科が3年生対象の授業「キャリア設計プロジェクト実践」で、企業の採用担当者をお招きして業界職種研...

2023.06.23
「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」にて中間発表会を実施しました!
工学部4学科[電気電子工学科、電子機械工学科、機械工学科、環境科学科]と情報通信工学部1学科[通信工学科]の3年次合同開講科目を今年度...

2023.03.29
自由工房の学生が「第25回ROBO-ONE Light」で人工知能ロボット賞を受賞しました
3/12(日)、厚木商工会議所(神奈川県・厚木市)で開催された「第25回ROBO-ONE Light」で自由工房の島田紘也さん(工学部...
2023.03.24
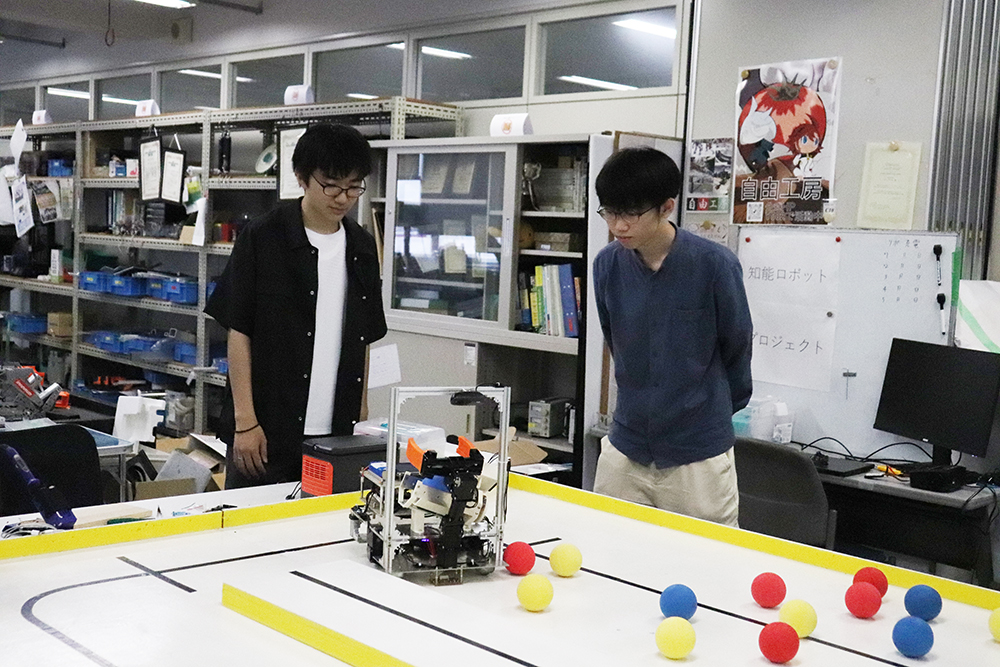
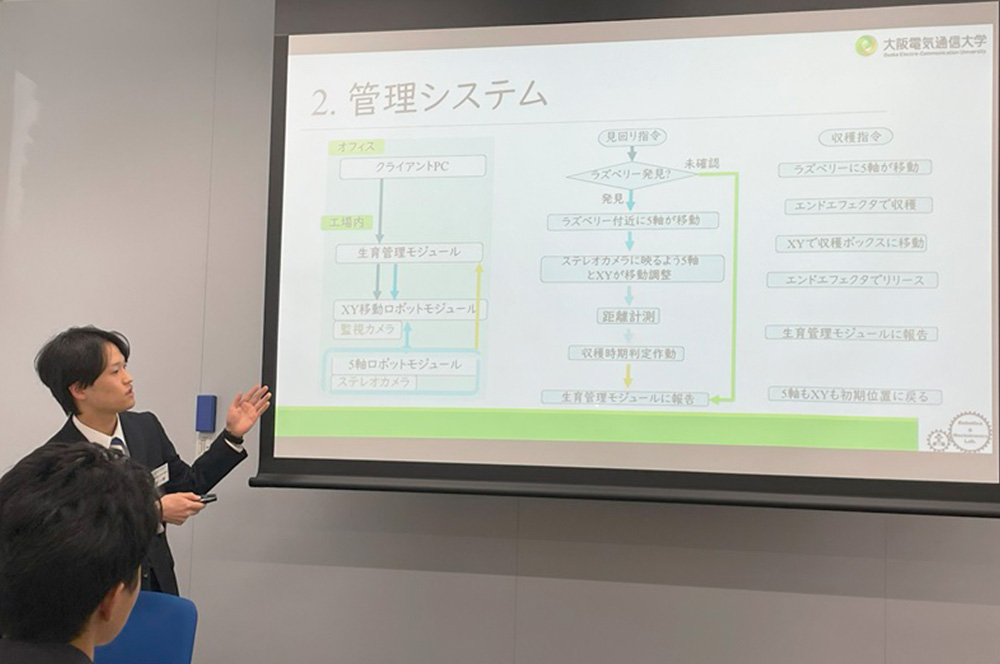
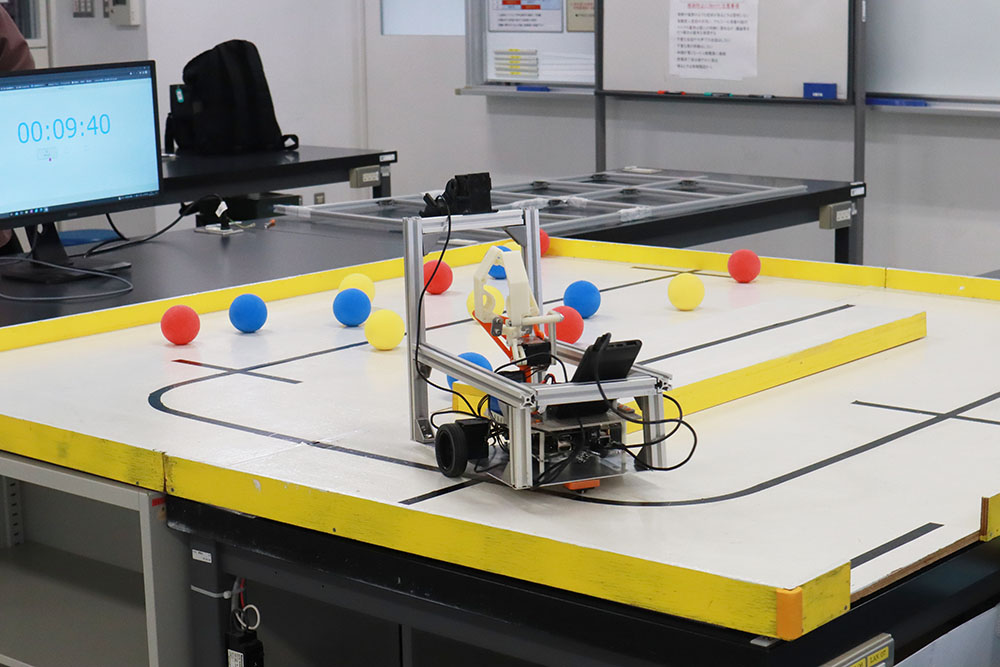
日本産業技術教育学会の「発明・工夫コンテスト」で電子機械工学科 兼宗研究室の学生が奨励賞を受賞しました
日本産業技術教育学会主催の「第17回技術教育創造の世界(大学生版)発明・工夫コンテスト」で、工学部電子機械工学科 兼宗研究室の学生2人...
2023.03.20
知能ロボットコンテスト関西地区大会2023が本学で開催されました
3月10日(金)、知能ロボットコンテスト関西地区大会2023が本学で初開催されました。知能ロボットコンテストは、1999年にスタートし...

2022.12.05
電子機械工学科 兼宗進教授らが開発した教育支援システム「Bit Arrow」の利用者が急伸長しています
電子機械工学科 兼宗進教授(本学副学長・ICT社会教育センター長代理)が東京農工大学、明星大学との共同研究として開発した、プログラミン...
2022.09.22
授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」の最終発表会を行いました
工学部4学科(電子機械工学科、機械工学科、環境科学科、電気電子工学科)と情報通信工学部通信工学科の合同開講科目(3年次)を2020年度...

2022.07.29
電子機械工学科・機械工学科3年生「キャリア設計プロジェクト実践」の授業で業界職種研究会を開催しました
7月14日(木)、電子機械工学科・機械工学科の3年生対象「キャリア設計プロジェクト実践」の授業の一環で、10社の企業の方々をお招きして...