工学部
電子機械工学科

電子機械工学科
の記事一覧
2023.03.20
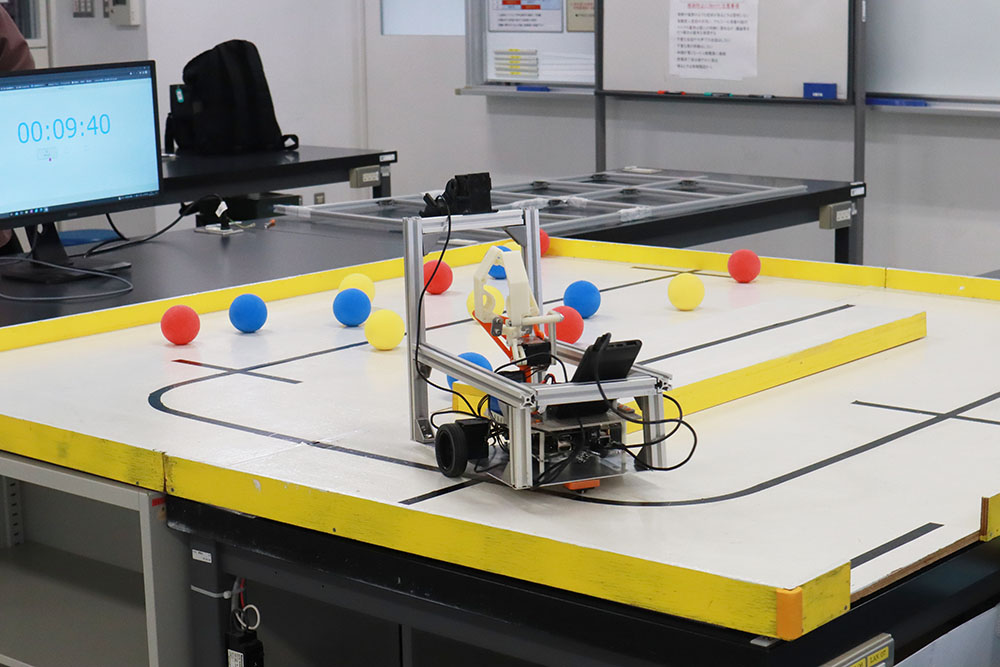
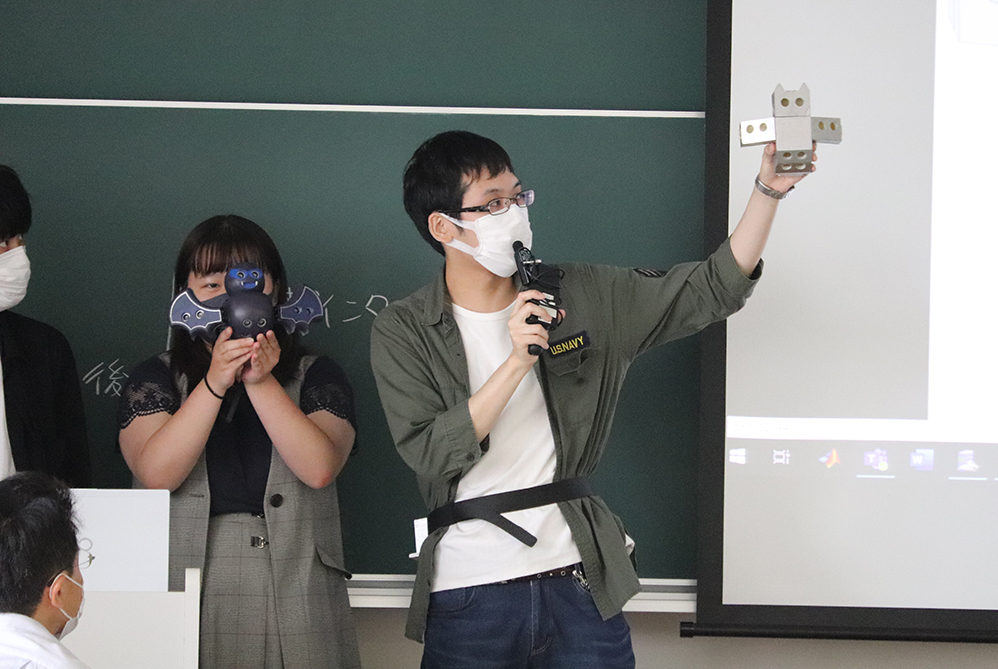
知能ロボットコンテスト関西地区大会2023が本学で開催されました
3月10日(金)、知能ロボットコンテスト関西地区大会2023が本学で初開催されました。知能ロボットコンテストは、1999年にスタートし...

2022.12.05
電子機械工学科 兼宗進教授らが開発した教育支援システム「Bit Arrow」の利用者が急伸長しています
電子機械工学科 兼宗進教授(本学副学長・ICT社会教育センター長代理)が東京農工大学、明星大学との共同研究として開発した、プログラミン...
2022.09.22
授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」の最終発表会を行いました
工学部4学科(電子機械工学科、機械工学科、環境科学科、電気電子工学科)と情報通信工学部通信工学科の合同開講科目(3年次)を2020年度...

2022.07.29
電子機械工学科・機械工学科3年生「キャリア設計プロジェクト実践」の授業で業界職種研究会を開催しました
7月14日(木)、電子機械工学科・機械工学科の3年生対象「キャリア設計プロジェクト実践」の授業の一環で、10社の企業の方々をお招きして...
re.jpg)
2022.06.17
「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」にて中間発表会を実施!
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科)と情報通信工学部通信工学科の合同開講科目(3年次)を今年度も実施...

2022.03.31
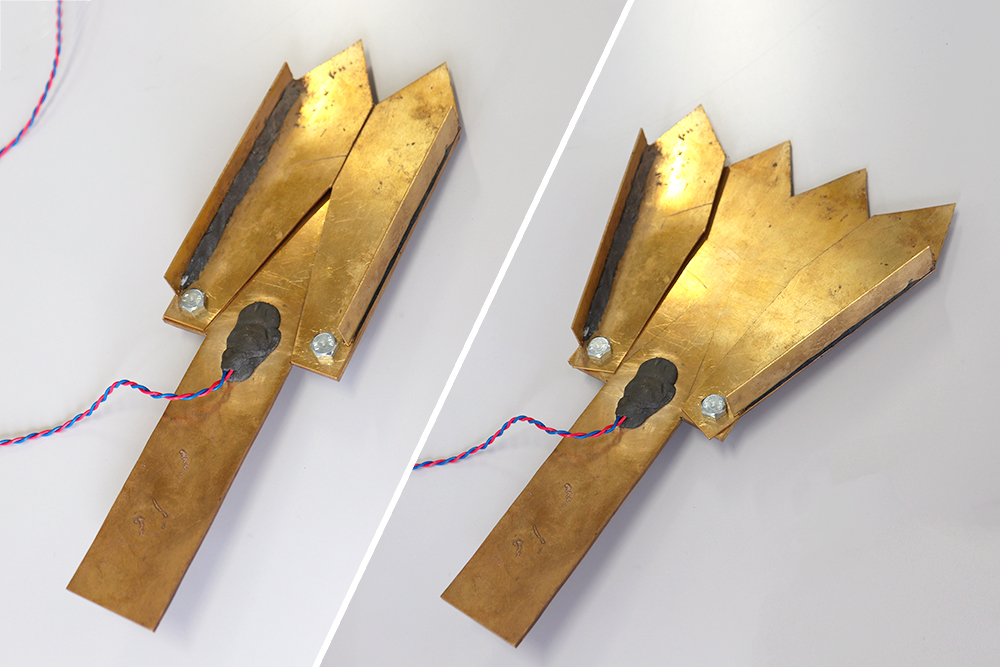
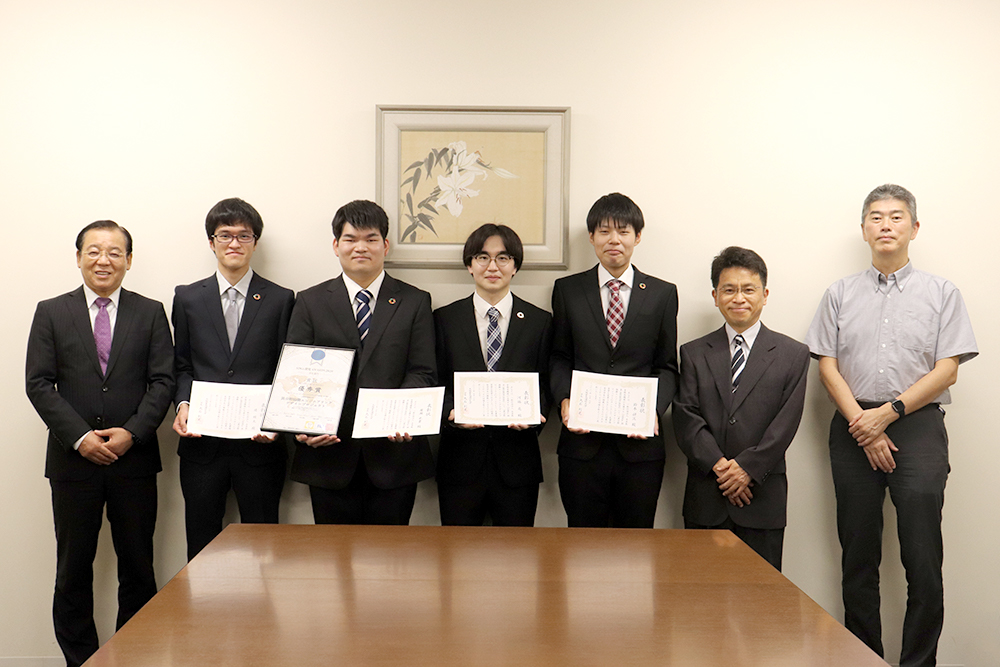
日本産業技術教育学会の「発明・工夫コンテスト」で電子機械工学科兼宗研究室の学生が学会長賞・奨励賞を受賞しました
日本産業技術教育学会主催の「第16回技術教育創造の世界(大学生版)発明・工夫コンテスト」で、工学部電子機械工学科・兼宗研究室の学生5人...
2022.03.24
日本機械学会関西支部主催の卒業研究発表講演会で入部研究室の学生がBPAを受賞しました
3月15日(火)に開催された日本機械学会関西支部主催の2021年度関西学生会学生員卒業研究発表講演会で、電子機械工学科 入部研究室の卒...
2022.03.17
「SDGs探求AWARDS 2021」で審査員特別賞を受賞しました
一般社団法人 未来教育推進機構が主催する「SDGs探求AWARDS 2021」で、本学の「異分野協働エンジニアリングデザイン演習・チー...

2021.12.22
電子機械工学科1年生 吉田伊織さんがテクノアイデアコンテスト「テクノ愛2021」で入賞しました
工学部電子機械工学科1年生の吉田伊織さんが、テクノアイデアコンテスト「テクノ愛2021」にて健闘賞を受賞しました。同コンテストは、将来...

2021.10.13
「World Robot Summit 2020 福島大会」で工学部電子機械工学科の入部教授が解説を担当しました
10月6日(水)から10日(日)に、福島県南相馬市の福島ロボットテストフィールドで行われたWorld Robot Summit(WRS...
2021.09.17
授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」の最終発表会を行いました
工学部4学科(電子機械工学科、機械工学科、環境科学科、電気電子工学科)と情報通信工学部通信工学科の合同開講科目(3年次)を昨年度より実...

2021.09.14
World Robot Summit in Aichiに電子機械工学科の鄭研究室が出場 トイレ清掃タスク4位・接客タスク4位に入賞しました
9月9日(木)から12日(日)に愛知県名古屋市で開かれたWorld Robot Summit2020競技会、サービスロボットカテゴリの...

2021.09.13
情報処理学会 情報教育シンポジウムで兼宗研究室の大学院生が優秀デモ・ポスター賞を受賞しました
情報処理学会の情報教育シンポジウム(SSS2021)がオンラインで行われ、大阪電気通信大学高等学校の岸本有生先生を中心とした兼宗研究室...

2021.09.08
「異分野協働エンジニアリングデザインプロジェクト」チームが『SDGs探求AWARDS』主催者より、取材を受けました
『SDGs探求AWARDS』は、国連が掲げる、SDGs(持続可能な開発目標)をテーマとした探究活動発表の場として、設立されました。今回...
2021.07.09
SDGs探求AWARDSで優秀賞を受賞した学生らに学長表彰を行いました
7月6日(火)、「学長表彰」の表彰式が寝屋川キャンパスで執り行われました。学科横断横断型プロジェクト「異分野協働エンジニアリング・デザ...

2021.06.18
新授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」にて中間発表会を行いました
工学部4学科(電気電子工学科、電子機械工学科、機械工学科、環境科学科)と情報通信工学部通信工学科の合同開講科目(3年次)を今年度も実施...
2021.05.24
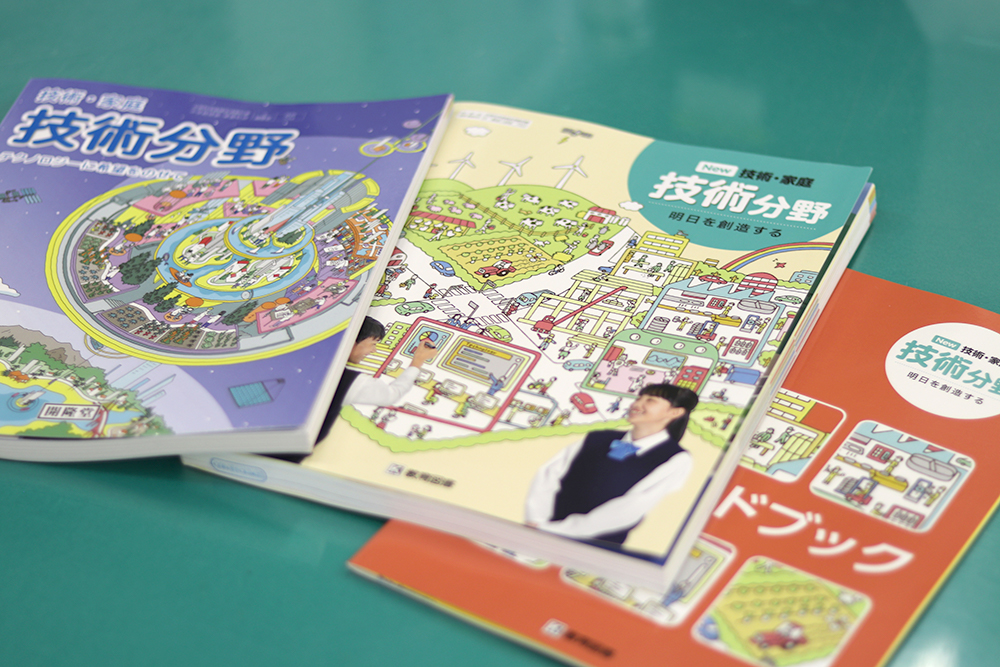
令和3年度 中学校技術分野の教科書で兼宗教授が開発したプログラミング言語が紹介されています
工学部電子機械工学科の兼宗進教授が開発したプログラミング言語「ドリトル」が、令和3年度 中学校技術分野の文部科学省検定済教科書で紹介さ...

2021.04.21
電子機械工学科の学生が情報処理学会 第83回全国大会で学生奨励賞を受賞しました
電子機械工学科の中 智宏さん(2020年度卒業)が、一般社団法人情報処理学会が主催する第83回全国大会で「学生奨励賞」を受賞しました。...
2021.03.23
『SDGs探求AWARDS 2020』で優秀賞を受賞しました
一般社団法人 未来教育推進機構が主催する『SDGs探求AWARDS 2020』で、本学の『異分野協働エンジニアリングデザインプロジェク...
2020.12.18
新授業科目「異分野協働エンジニアリング・デザイン演習~学科横断型プロジェクト~」の最終発表会を行いました
工学部4学科(電子機械工学科、機械工学科、環境科学科、電気電子工学科)と情報通信工学部通信工学科の合同開講科目(3年次)が今年度より開...